14.3
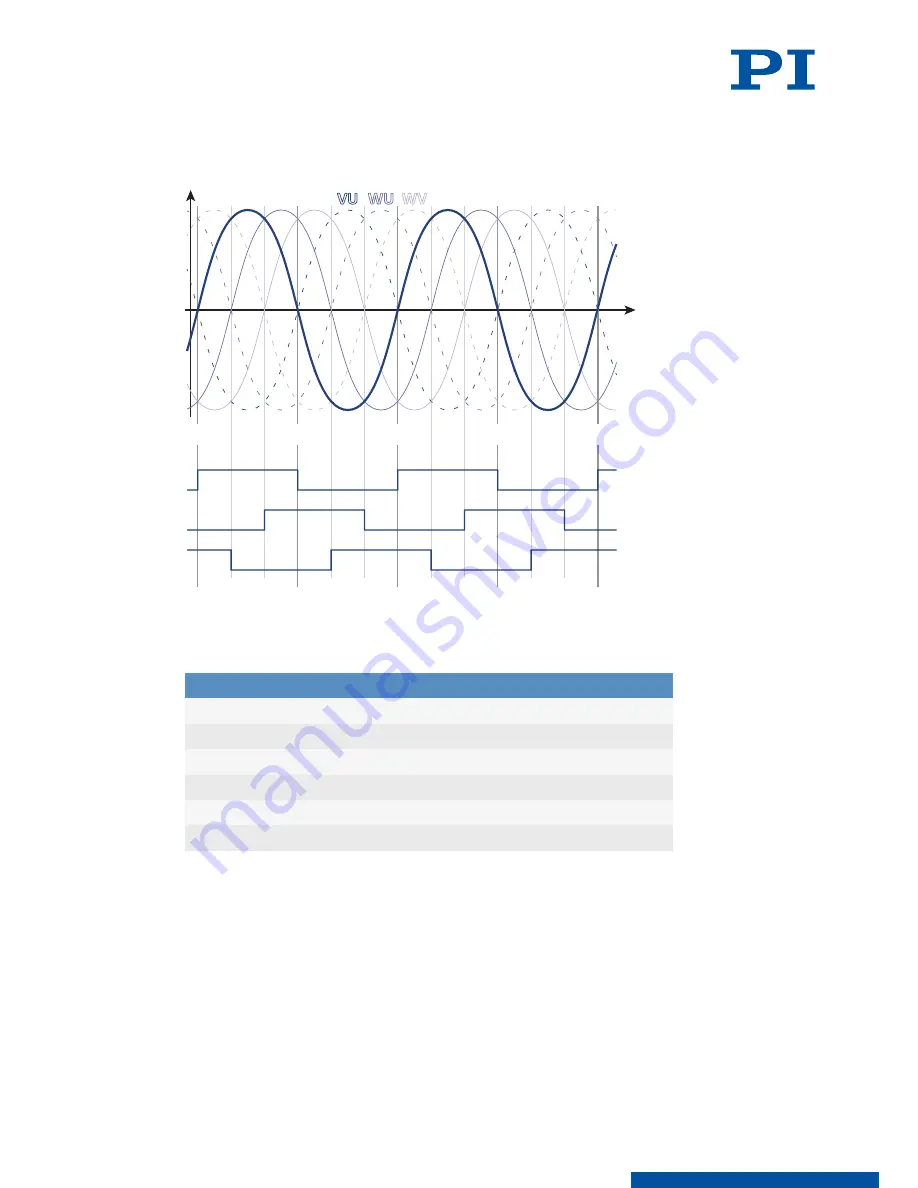
Commutation Encoder
The L-417.xx9211E1B's motor has a commutation encoder that codes the position of the
magnets in the same way as a Hall effect sensor.
0
π
2π
3π
4π
V
W
U
UV
VW
UW
Figure 12: Motor phases (top) and signal output to the commutation tracks (bottom)
14.4
Holding Brake Specifications
Parameters
Value
Supply voltage
24 V
Power requirement
350 mA (min)
Static braking torque
1.42 Nm
Release brake delay
35 ms
Brake delay
36 ms
Linear brake offset
14 μm (max); 6.4 μm (typical)
14 APPENDIX
L417M0017EN
‒
5/20/2019
37
M O T I O N | P O S I T I O N I N G