



























Function description
Operating Manual PMCprimo MC
1003813-EN-03
| 16
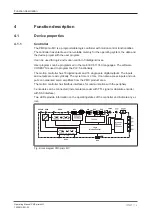
To create a connection, a fieldbus distributor PMCprimo DriveP.CAN-CAN-Adapter (2) is
required with the servo amplifier PMCprotego D.
X40a
PMCprimo DriveP.CAN-CAN-Adapter (2)
X43
CAN1
CAN2
C
A
N
1 C
A
N
2
PMCprimo MC (1)
PMCprotego D (3)
Ethernet
X42
Fig.: Motion controller with servo amplifier, networking via CANopen
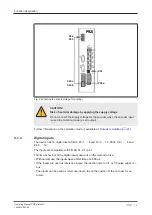
Networking of PMCprimo MC (1) with the servo amplifier PMCprotego D (3)
}
Via the communication protocol EtherCAT
}
Via the interface X44 (RJ45).
There is not adapter required.
X40a
X50a/b
X43
PMCprimo MC (1)
PMCprotego D (2)
Ethernet
X7A
X7B EtherCAT
X44
Fig.: Motion controller with servo amplifier, networking via EtherCAT
INFORMATION
Networking with PROFIBUS between servo amplifier and motion controller
is not possible because both devices operate as slaves.







































































