





























69
AVIC-W8400NEX/XNUC
5
6
7
8
5
6
7
8
A
B
C
D
E
F
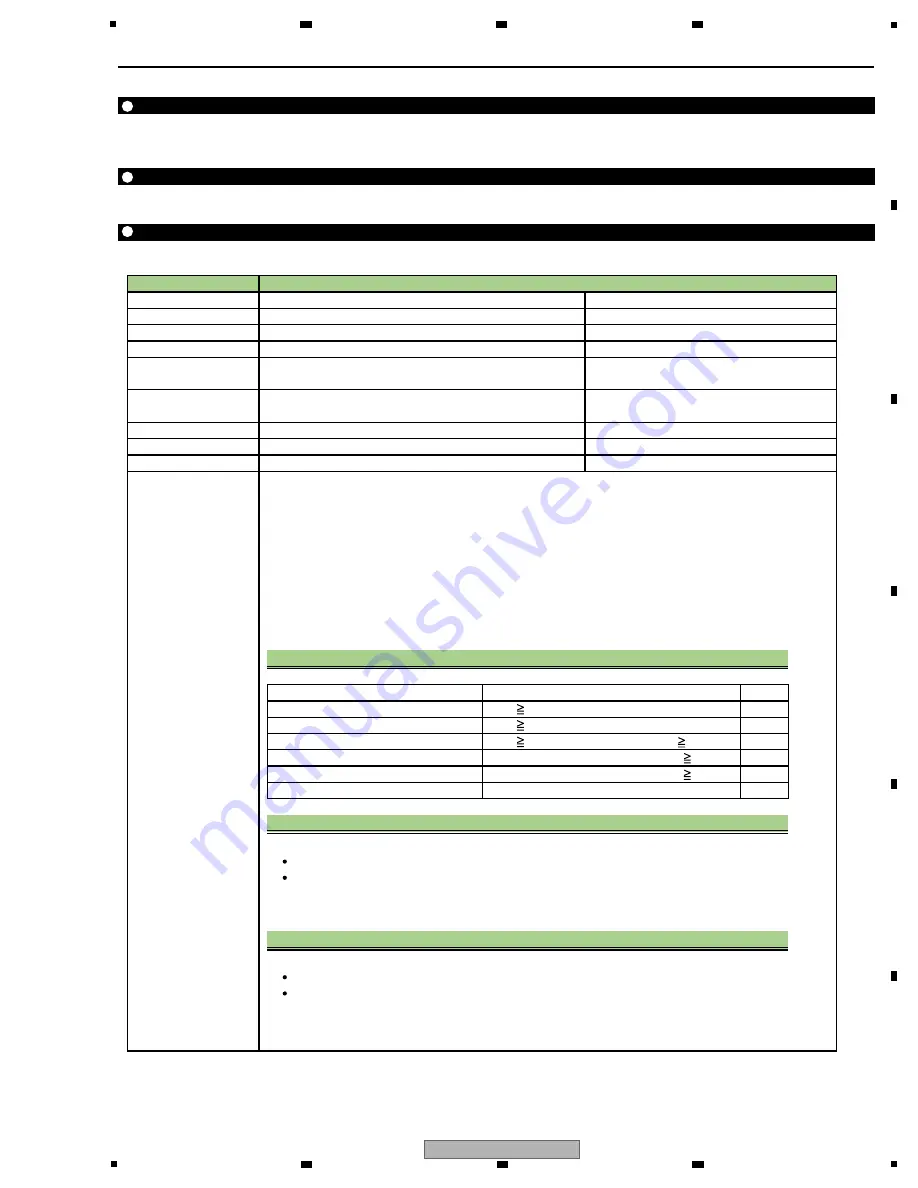
18. Ext Connection Test
This test is for confirming the status of leads, Gyro Sensor and G Sensor information.
Gyro Sensor and G Sensor can be inspected using this test.
Outline
BACK
: Return to Main Menu
Allocation of Key Operation
Description
Following information is displayed.
Item
ON/OFF
Illumination terminal state
Illumination
ON/OFF
Parking brake terminal state
Parking Brake
uCom Reverse
CHIPS Reverse
HI/LOW
GPS antenna connection state
GPS OPEN
(HI: Connected, LOW: Not connected)
HI/LOW
GPS antenna short-circuit state
GPS SHORT
(HI: Open, LOW: Short-circuited)
-
Number of speed pulse
Car Speed Pulse
OFFSET terminal state
ON/OFF
OFFSET
ON/OFF
TELMUTE terminal state
TELMUTE
Gyro Sensor
1. Rotation Level : When "Counterclockwise Rotation Level: 1" or higher, and "Clockwise
Rotation Level: 1" or higher are individually detected even once, the
Rotation Level is OK.
2. Sensor Output : When "Gyro Sensor Output Value Judgment" is OK, the Sensor
Output is OK.
3. Variation :
When the OK state of "Variation OK/NG Information" continues for
more than 5 seconds, the Variation is OK.
Display of Gyro Sensor Rotation Level
>>>
Rotation angular velocity > 50.0
Clockwise Rotation Level 3
Clockwise Rotation Level 2
Clockwise Rotation Level 1
No Rotation
Counterclockwise Rotation Level 1
Counterclockwise Rotation Level 2
Counterclockwise Rotation Level 3
Sensor Output
It displays the following values obtained from sensor information for Yaw axis, Pitch axis and Roll axis.
Gyro sensor AD value
Determination of output value of Gyro sensor
0x00
: NG
Other than 0x00 : OK
Variation
It displays the following values obtained from sensor information for Yaw axis, Pitch axis and Roll axis.
Gyro sensor dispersion value
Variation OK/NG information
0x05 or 0x06
: OK
Other than those above : NG
Description
Reverse terminal state acquired from System uCom
HI/LOW
Reverse terminal state acquired from CHIPS
HI/LOW
Rotation Level, Sensor Output and Variation
[OK Judgment] When all of the following three items are OK, the inspection result is OK.
50.0 Rotation angular velocity > 40.0
>>
40.0 Rotation angular velocity > 30.0
>
30.0 Rotation angular velocity -30.0
*****
-30.0 > Rotation angular velocity -40.0
<
-40.0 > Rotation angular velocity -50.0
<<
-50.0 > Rotation angular velocity
<<<







































































