












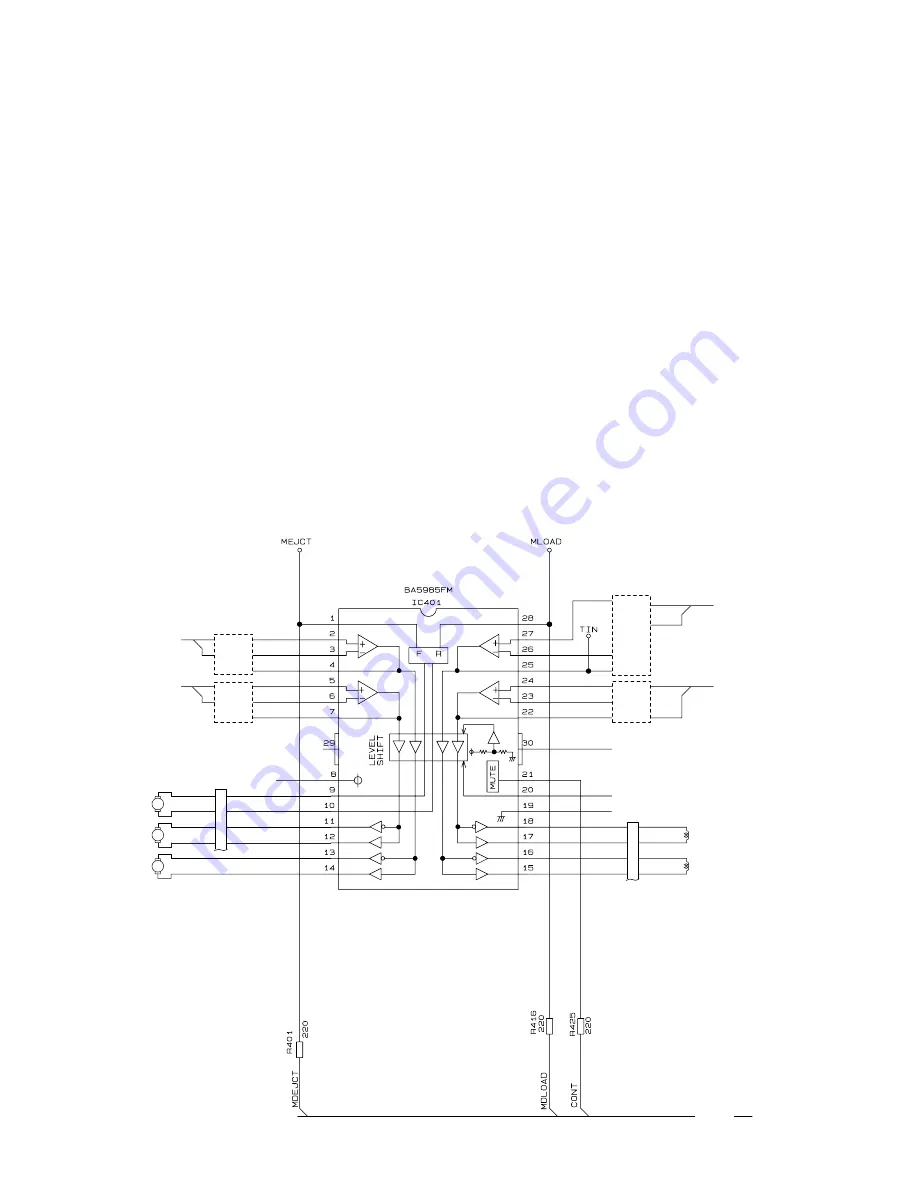
1.3 POWER SUPPLY AND DRIVER BLOCK (BA5985FM: IC401)
1) Power supply
Switched system power supplies MDVD and PVD (8.3V) from the mother board and backup system power supply VDD
(5V) are used for this system (see the power supply system diagram).
3.3V for driving MD/LSI system and LD is generated from MDVD. In order to drive large current, only PVD (3.3V) is
used as the driver power.
Pro-test is prepared to detect voltage error in MDVD.
As soon as overvoltage beyond 9.9V or undervoltage below 3.5V is detected, MD microcomputer turns off the start
control signal (VDON) from VD to stop supply of VD from the mother PCB.
In this case, ERR A0 indicating a power supply system error is displayed on the product.
2) Driver block
It is a linear driver used for driving 5 channels consisted of 1 channel on Load/EJ system and 4 channels on
actuator/SPDL/CRG system.
Forward/reverse drive (approximately 7.5V) of the Load/EJ system is implemented by the control signals (MLOAD AND
MEJCT) from the MD microcomputer.
4-channel system conducts binary PWM signal to the differential L.P.F, then supplies it driver.
You can monitor respective signals as analog signals (FIN, TIN, SIN and CIN).
10
CX-683
M
M
M
MEJCT
C+
C–
CIN
S+
S–
SIN
GND
LOP
LOM
SOM
SOP
COM
COP
MLOAD
T+
T–
TIN
F+
F–
FIN
GND
PVC
CONT
GND
FOM
FOP
TOM
TOP
CRG
SYSTEM
RC
LADDER
RC
LADDER
FOCUS
SYSTEM
RC
LADDER
SPDL
SYSTEM
RC
LADDER
PVD
LOAD/ET
Motor
SPDL
Motor
CRG
Motor
FOCUS
actuator
TRKG
actuator
CN401
LO+
LO–
SO+
SO–
CN101
F–
F+
T–
T+
SFDR
SRDR
SPRD
SPFD
< IC201 >
< IC201 >
< IC301 >
MD microcomputer
TRKG SYSTEM
TRDR
TFDR
< IC201 >
FFDR
FRDR
< IC201 >







































































