





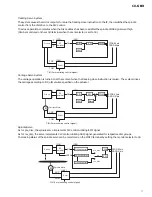







Tracking Servo System
The system causes the microcomputer to issue the tracking close instruction to the IC, then switches the spindle
control from the ofst drive to the CLV control.
The close operation completes when the Disc address has been read after the spindle LOCK signal went high
(Can be monitored on the mnt0 terminal when the mnt selector is set to 00).
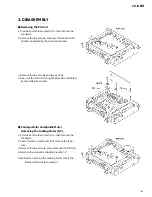
Carriage Servo System
The carriage operation is turned on at the moment when the tracking close instruction is issued. The system drives
the carriage according to DC_ofst volume specified on the actuator.
7
CX-683
A/D
TE
TIN (For monitoring control signal)
TOP
TOM
E
F
RF
amplifier
Driver
Pick up
IC201
IC101
IC401
OFST
EQ
PWM
TFDR 86pin
TRDR 85pin
A/D
SE
CIN (For monitoring control signal)
COP
COM
E
F
RF
amplifier
Driver
Carriage Motor
Pick up
IC201
IC101
IC401
OFST
EQ
Move
PWM
SFDR 92pin
SRDR 91pin
M
Timing Control
Timing Control
RF
ADFG
SIN (For monitoring control signal)
SOP
SOM
RF
amplifier
Driver
Spindle Motor
Pick up
IC201
IC101
IC401
FM Demodulation
EQ
pre_disc
rec_disc
PWM
SFDR 92pin
SRDR 91pin
M
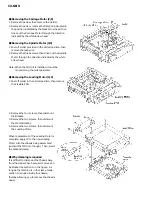
Spindle Servo
As for pre_disc, the spindle servo implements CLV control utilizing EFM signal.
As for rec_disc, the servo implements CLV control utilizing ADIP signal generated for respective disc groups.
The locking status of the spindle servo can be monitored on the MNT3 terminal by setting the monitor selector to 00.







































































