





















Main design considerations
Being designed as a generic mfb correction module EVE supports a wide variety of driver, enclosure and
loopgain choices. Because of this generic setup it is not possible to provide a common set of component
values, to assist the user with making educated choices the following information is given.
Servo / Motional
based enclosures such as bass reflex boxes.
Servo loop gain
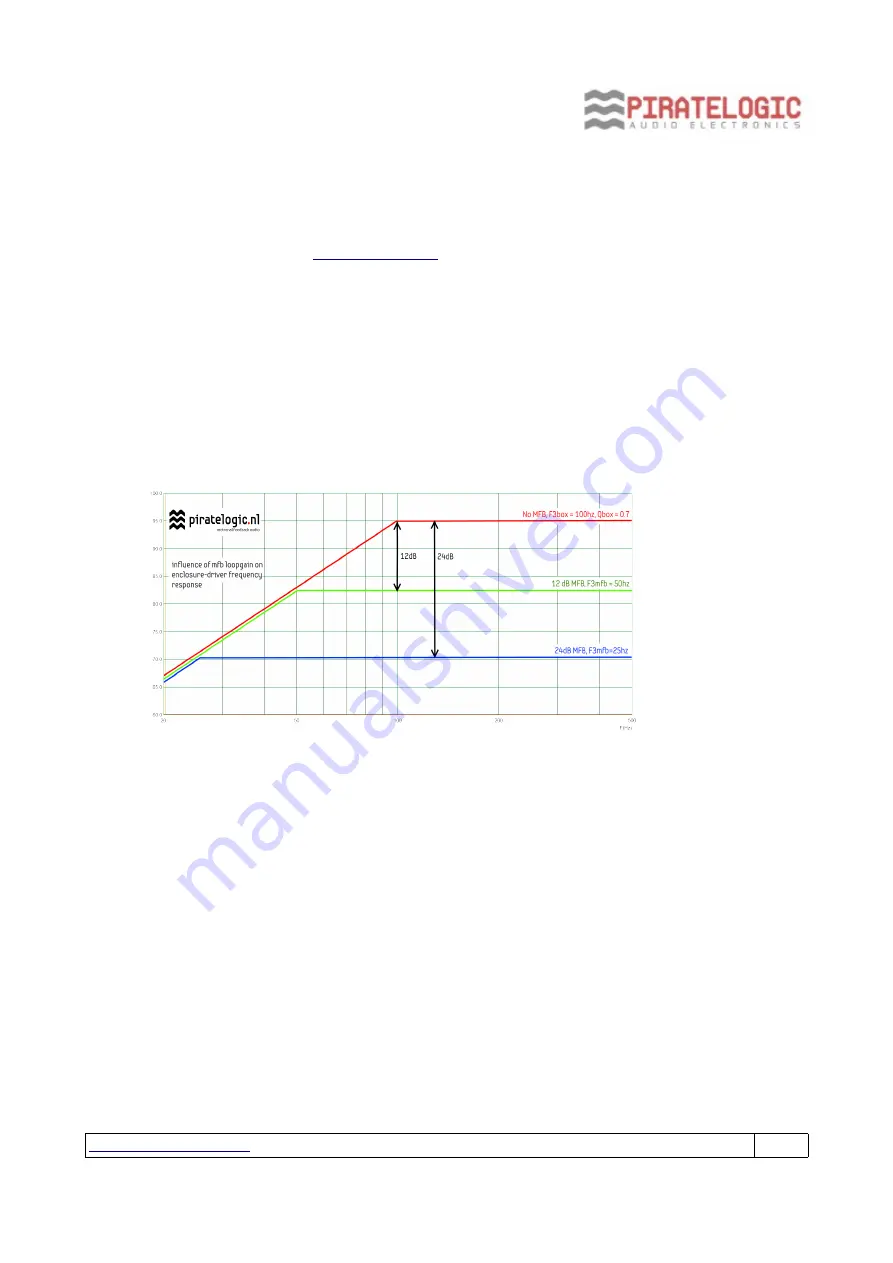
EVE has been designed to offer a theoretical maximum servo loopgain of 20dB, refer to below graph for the
relation between servo loopgain and a Q0.7 enclosure frequency response. Servo loopgain determines:
•
The
F3mfb
, the higher the amount of gain the lower the resulting
F3mfb
will be.
•
Maximum SPL, the 'extra' energy is rerouted to low extension.
•
The amount of second and third harmonics supression available .
05/03/2022@07:37:22
Page 7







































































