




























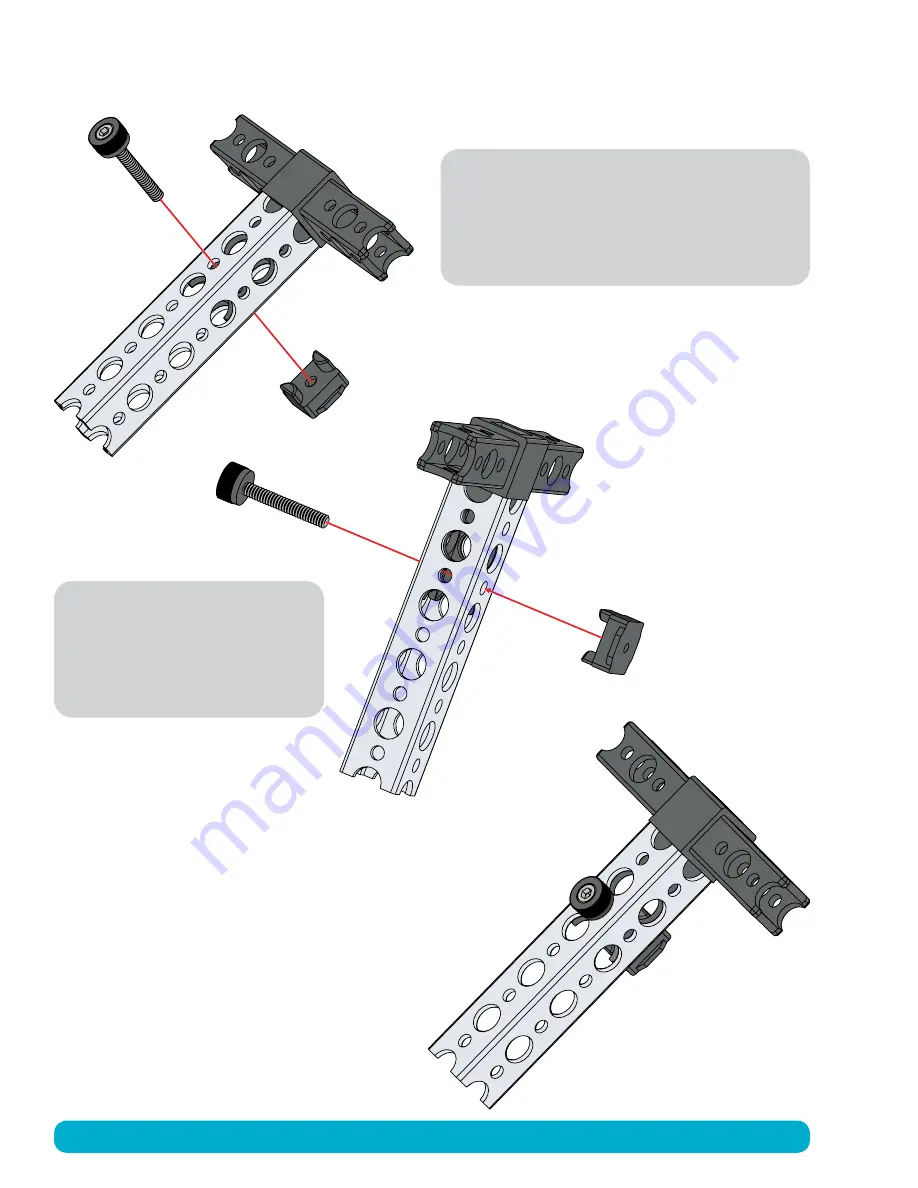
Joints can be made more permanent by using a Thumbscrew and Wing Nut to secure the beams and connectors.
TIP:
Wing Nuts are placed in position first and
Thumbscrews are tightened into them. After Wing
Nuts are placed and seated properly, they cannot be
turned.
TIP:
Thumbscrews should
be snug but not overtightened.
Overtightening Thumbscrews can
damage components.
12
Introduction to Building with TETRIX PRIME
Summary of Contents for 41427
Page 1: ...RobotBuilder sGuide for NI myRIO 41427 POWERED BY...
Page 2: ......
Page 20: ......
Page 23: ...Finished Assembly Step 5 Subassembly Construction Instructions 21...
Page 25: ...Step 5 Step 6 Step 7 Step 9 Step 8 Step 10 Subassembly Construction Instructions 23...
Page 26: ...Step 12 Step 14 Step 16 Step 11 Step 13 Step 15 24 Subassembly Construction Instructions...
Page 27: ...Step 18 Step 17 Finished Assembly Subassembly Construction Instructions 25...
Page 29: ...Step 6 Finished Assembly Step 5 Subassembly Construction Instructions 27...
Page 54: ......
Page 57: ...Step 1 0 Step 1 1 Rover Vehicle Assembly 55...
Page 58: ...Step 1 2 Step 1 3 56 Rover Vehicle Assembly...
Page 59: ...Step 1 4 Rover Vehicle Assembly 57...
Page 61: ...Step 2 0 Step 2 1 Rover Vehicle Assembly 59...
Page 62: ...Step 2 2 60 Rover Vehicle Assembly...
Page 64: ...Step 3 0 Step 3 1 62 Rover Vehicle Assembly...
Page 65: ...Step 3 2 Step 3 3 Rover Vehicle Assembly 63...
Page 66: ...Step 3 4 Step 3 5 64 Rover Vehicle Assembly...
Page 68: ...Step 4 0 Step 4 1 66 Rover Vehicle Assembly...
Page 69: ...Step 4 2 Step 4 3 Rover Vehicle Assembly 67...
Page 70: ...Step 4 4 Step 4 5 68 Rover Vehicle Assembly...
Page 71: ...Step 4 6 Step 4 7 Rover Vehicle Assembly 69...
Page 73: ...Step 5 1 Step 5 0 Step 5 2 Step 5 3 Step 5 4 Step 5 5 Rover Vehicle Assembly 71...
Page 74: ...Step 5 6 Step 5 7 72 Rover Vehicle Assembly...
Page 76: ...Step 6 0 Step 6 1 74 Rover Vehicle Assembly...
Page 77: ...Step 6 2 Step 6 3 Rover Vehicle Assembly 75...
Page 78: ...Step 6 4 76 Rover Vehicle Assembly...
Page 84: ......
Page 87: ...Step 1 0 Step 1 1 Step 1 2 BalancingArmAssembly 85 Balancing Arm Assembly 85...
Page 88: ...Step 1 4 Step 1 3 86 BalancingArmAssembly 86 Balancing Arm Assembly...
Page 89: ...Step 1 6 Step 1 5 BalancingArmAssembly 87 Balancing Arm Assembly 87...
Page 90: ...Step 1 8 Step 1 7 88 BalancingArmAssembly 88 Balancing Arm Assembly...
Page 91: ...Step 1 10 Step 1 9 BalancingArmAssembly 89 Balancing Arm Assembly 89...
Page 92: ...Step 1 12 Step 1 11 90 BalancingArmAssembly 90 Balancing Arm Assembly...
Page 93: ...Step 1 14 Step 1 13 BalancingArmAssembly 91 Balancing Arm Assembly 91...
Page 94: ...Step 1 16 Step 1 15 92 BalancingArmAssembly 92 Balancing Arm Assembly...
Page 95: ...Step 1 17 BalancingArmAssembly 93 Balancing Arm Assembly 93...
Page 97: ...Step 2 0 Step 2 1 BalancingArmAssembly 95 Balancing Arm Assembly 95...
Page 98: ...Step 2 2 Step 2 3 96 BalancingArmAssembly 96 Balancing Arm Assembly...
Page 99: ...Step 2 4 Step 2 5 BalancingArmAssembly 97 Balancing Arm Assembly 97...
Page 100: ...Step 2 6 Step 2 7 98 BalancingArmAssembly 98 Balancing Arm Assembly...
Page 101: ...Step 2 8 Step 2 9 BalancingArmAssembly 99 Balancing Arm Assembly 99...
Page 102: ...Step 2 10 Step 2 11 100 BalancingArmAssembly 100 Balancing Arm Assembly...
Page 103: ...Step 2 12 Step 2 13 BalancingArmAssembly 101 Balancing Arm Assembly 101...
Page 105: ...Step 3 0 Step 3 1 BalancingArmAssembly 103 Balancing Arm Assembly 103...
Page 106: ...Step 3 2 Step 3 3 104 BalancingArmAssembly 104 Balancing Arm Assembly...
Page 108: ...Step 4 0 Step 4 1 106 BalancingArmAssembly 106 Balancing Arm Assembly...
Page 109: ...Step 4 2 Step 4 3 BalancingArmAssembly 107 Balancing Arm Assembly 107...
Page 110: ...Step 4 4 Step 4 5 108 BalancingArmAssembly 108 Balancing Arm Assembly...
Page 111: ...Step 4 6 Step 4 7 BalancingArmAssembly 109 Balancing Arm Assembly 109...
Page 112: ...Step 4 8 Step 4 9 110 BalancingArmAssembly 110 Balancing Arm Assembly...
Page 113: ...Step 4 10 BalancingArmAssembly 111 Balancing Arm Assembly 111...
Page 115: ...Step 5 1 Step 5 0 BalancingArmAssembly 113 Balancing Arm Assembly 113...
Page 116: ...Step 5 3 Step 5 2 114 BalancingArmAssembly 114 Balancing Arm Assembly...
Page 117: ...Finished assembly should look like this BalancingArmAssembly 115 Balancing Arm Assembly 115...
Page 124: ......
Page 127: ...Step 1 0 Step 1 1 Self Balancing Robot Assembly 125...
Page 128: ...Step 1 2 Step 1 3 126 Self Balancing Robot Assembly...
Page 129: ...Step 1 4 Step 1 5 Step 1 6 Self Balancing Robot Assembly 127...
Page 131: ...Step 2 0 Step 2 1 Self Balancing Robot Assembly 129...
Page 132: ...Step 2 2 Step 2 3 130 Self Balancing Robot Assembly...
Page 133: ...Step 2 4 Step 2 5 Self Balancing Robot Assembly 131...
Page 135: ...Step 3 0 Step 3 1 Self Balancing Robot Assembly 133...
Page 136: ...Step 3 2 Step 3 3 134 Self Balancing Robot Assembly...
Page 137: ...Step 3 4 Step 3 5 Self Balancing Robot Assembly 135...
Page 138: ...Step 3 6 Step 3 7 136 Self Balancing Robot Assembly...
Page 139: ...Step 3 8 Step 3 9 Self Balancing Robot Assembly 137...
Page 140: ...Step 3 10 Step 3 11 138 Self Balancing Robot Assembly...
Page 141: ...Step 3 12 Self Balancing Robot Assembly 139...
Page 143: ...Partial assembly should look like this Self Balancing Robot Assembly 141...
Page 144: ...Step 4 1 Step 4 0 142 Self Balancing Robot Assembly...
Page 145: ...Step 4 3 Step 4 2 Self Balancing Robot Assembly 143...
Page 146: ...Step 4 5 Step 4 4 144 Self Balancing Robot Assembly...
Page 147: ...Step 4 7 Step 4 6 Self Balancing Robot Assembly 145...
Page 148: ...Step 4 8 Step 4 9 146 Self Balancing Robot Assembly...
Page 149: ...Step 4 10 Self Balancing Robot Assembly 147...
Page 151: ...Step 5 0 Step 5 1 Self Balancing Robot Assembly 149...
Page 152: ...Step 5 2 150 Self Balancing Robot Assembly...
Page 153: ...Finished assembly should look like this Self Balancing Robot Assembly 151...







































































