




















△
12
11
CT1
C
B
A
c
b
1
0
9
8
7
6
5
4
3
2
19
20
21
CT2
a
3
1
3
0
2
9
2
8
2
7
2
6
2
5
2
4
2
3
2
2
FG
1
A
B
RS-485
C1
、
ub ua
uc
13 14 15 16 17 18
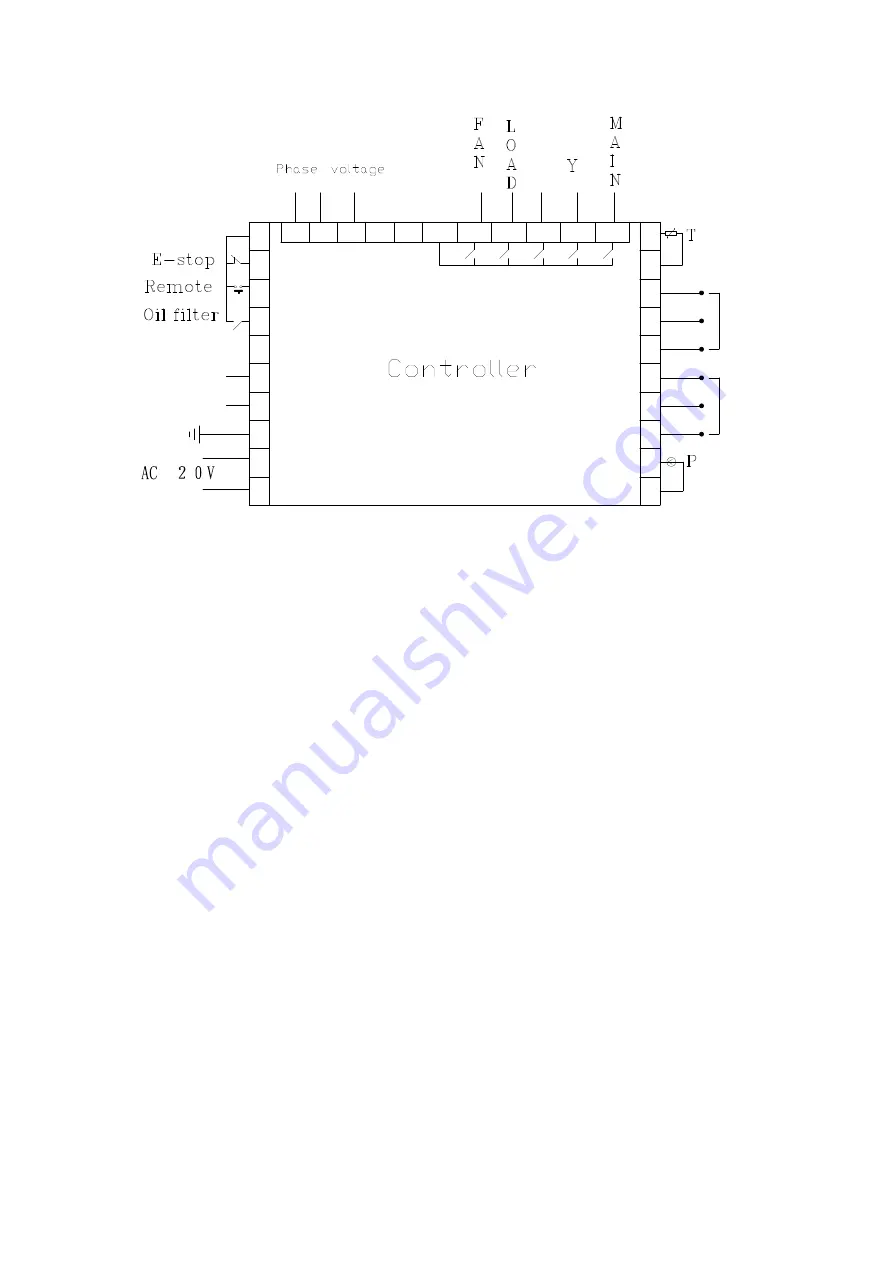
Figure 4.2.1
Terminal arrangement diagram
Terminal blocks of controller
:
1 is common terminal COM1
;
2 is input terminal for emergent stop signal
;
3 is remotely controlled for
on/off signal input terminal
;
4 terminal is used to detect oil filter blocked
;
6 is RS485 A; 7 is RS485 B
;
8 is the
simulated ground (Earth)
;
17 and 18 are the AC20V power source
;
22
、
23 terminals are Pressure Sensor signal
input
;
24
、
25
、
26 terminals are motor mutual inductor CT1 input
;
27
、
28
、
2 terminals are Fan mutual inductor
CT2 input
;
30
、
31 terminals are Temperature Sensor signal input
;
19
、
20
、
21 terminals Used to detect the phase
sequence and voltage
;
13 terminals is common terminal of output relay
;
14 terminals controls fan
;
15 terminals
controls load valve
;
16 terminals controls angle-shaped contactor
;
17 terminals controls star-shaped contactor
;
18 terminals controls main contactor
。
NOTE: Eelectromagnetism coil shall be connected with surge absorber during wiring, and
dotted lines are extendable functions.
5
、
Control principles
1、Local Automatic control
①
. press down start button for starting: (Y-
△
start)
There is fives of self-test after controller is energized and it can not be started by pressing start
button .The air compressor starts by pressing start button after self-test finished. The course of
compressor’s
start as followed: KM3 and KM2 are energized → Y
-
type status of start → delay time
is
reached (Y-
△
change-over time); KM3 is de-energized (KM1 and KM3 are interlocked) and KM1 is
energized → motor operates with
△
type to finish start. During the course of starting, all
electromagnetism valves are de-energized to achieve no load start.
②
. Automatic operation control:
When the motor is started to running in
△
status and load the magnetic valve with







































































