





























Chapter 5 Commissioning operation
ADSD-S-S
39
Parame
ters
designation
Set
Value
default
value
parameter specification
L004
control mode
1
0
Set to speed control
L025
Speed command source
3
3
Set to JOG source
L060
accelerating time of speed
instructions
apply
0
Reduce speed up impact
L061
Deceleration time of speed
instructions
apply
0
Reduce speed down impact
L076
JOG
service speed
100
100
JOG speed
L097
Ignore driving prohibition
3
3
Ignore the forward driving
prohibition(CCWL) and
inversion driving
prohibition(CWL)
L098
Force on
1 or 0
0
Force on, if coupled with
enable
,
set as 0,or not 1.
L100
Digital input DI1 function
1
1
DI1set to servo on(SON)
3. O
peration
Make sure no alarm and any abnormal situation, servo on is on, the RUN
pilot lamp
light, as
so the motor incents and stays in zero speed state.
In the auxiliary function, select dynamic operation “ P-JOG”, press
key enter JOG
o
peration
mode. Numerical unit is r/min, buttons provide speed instructions. Press
key and hold,
motor speed are positive operating according to JOG, loosen the buttons, the motor stop, and keep
the zero speed. Press
key to hold, motor speed according to JOG to negative moves, loosen the
buttons, the motor stops and keeps on the zero speed. JOG speed is set by L076 parameter.
5-1-3 Keyboard speed operation
1.Turn the power on
Connected to control power supply
(
main circuit power temporarily not
connect
)
,will make the
display light on, if the alarm appear, check the attachment please. Then, main circuit is connected,
POWER indicator is light.
2.
P
arameter setting
According to table to set parameters
Parame
ters
designation
Set
Value
default
value
parameter specification
L004
control mode
1
0
Set to speed control
L025
Speed command source
3
3
Set to JOG source
L097
Ignore driving prohibition
3
3
Ignore the forward
driving
Chapter 5 Commissioning operation
ADSD-S-S
40
prohibition(CCWL) and
inversion driving
prohibition(CWL)
L098
Force on
1 or 0
0
Force on, if coupled with
enable, set as 0,or not 1.
L100
Digital input DI1 function
1
1
DI1Set to servo on
3. O
peration
Make sure no alarm and any abnormal situation, servo on is on, the RUN
pilot lamp
light , as
so the motor incents and stays in zero speed state.
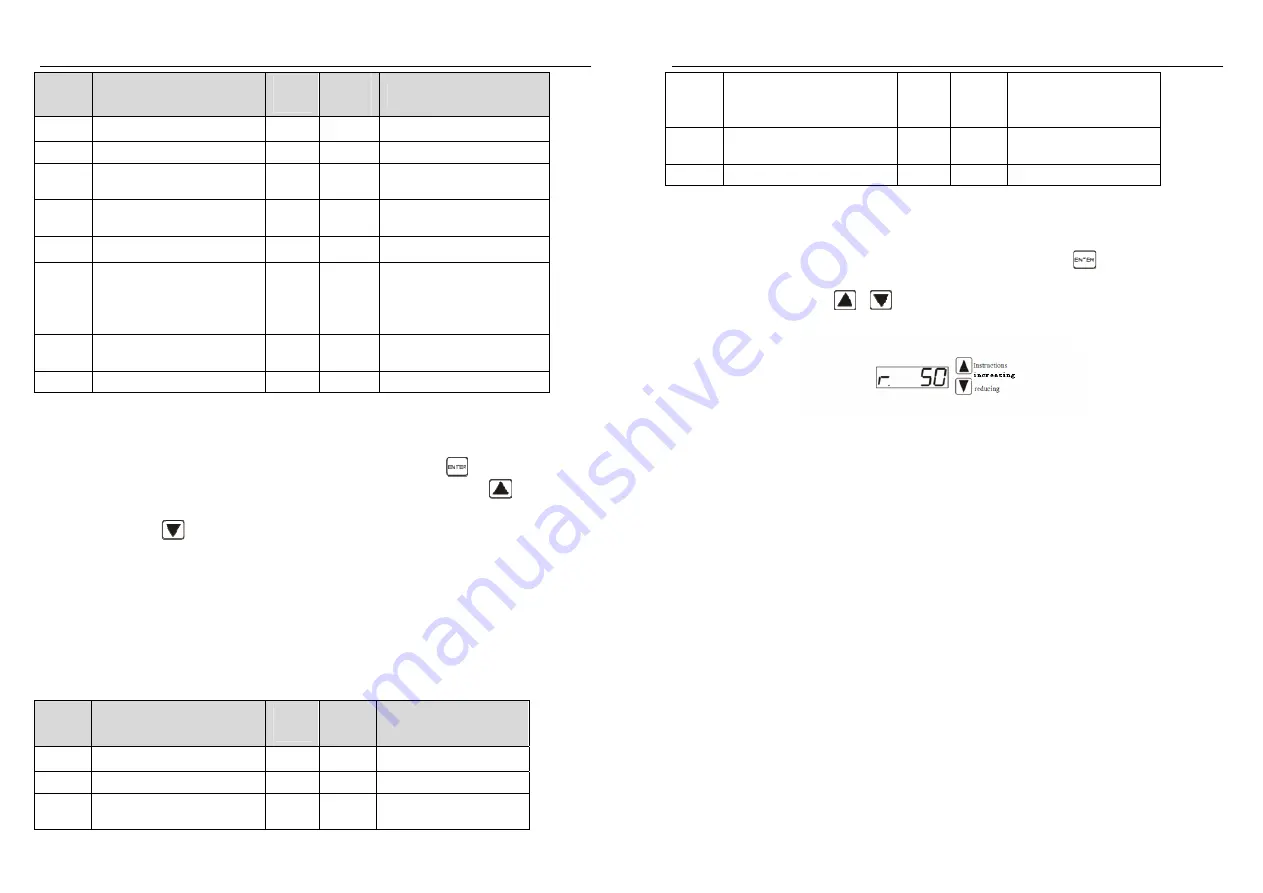
In the auxiliary function, select dynamic operation “P-JOG”, press
key enter keyboard
control operation mode. Numerical unit is r/min, buttons provide speed instructions. Change the
speed command by pressing
、
key ,motor according to given speed to turn. Positive means
forward
(
CCW
)
, negative means reversal (CW), 0.1r/min is the minimum given speed.
5-2 Position control mode
The position control is applied to the system that need precision positioning, such as CNC
machine tools, textile machinery, etc. Position instructions source is the pulse instructions, to
input
pulse through
PULS+
、
PULS-, SIGN+
、
SIGN- of the
input terminal
5-2-1 Wiring diagram
This is a simple example of position control, following is the wiring diagram.







































































