





























Chapter 5 Commissioning operation
ADSD-S-S
41
RB
RB1
W
PE
Servo
motor
Encoder
COM+
22
Red
White
Dark
Green
Builtin
breaking
resistance
AC220/
230V 1-phase
or 3-phse
50/60Hz
1
DI1
DI2
10
DI3
19
DI4
20
SON
DC12V-24V
Alarm clear
ARST
CCW drive
banned CCWL
CW drive
banned CWL
DO1
11
DOCOM
12
RDY
DO Common port
PULS+
13
PULS-
4
SIGN+
14
SIGN-
5
Position
instruction PULS
CZ
26
GND
24
Z signal output
open collector
Encoder signals ground
FG
metallic
shell
CN2
CN1
Position
instruction SIGN
T
S
R
MCCB
ADSD-S-S
Control
MC
L1
L2
V
U
5-2-2 Parameter setting
The parameters of the example setting :
Param
eters
designation
Set
value
default
value
parameter specification
L004
Control mode
0
0
Set to control mode
L097
Ignore driving ban
0
3
Ignore turn drive
banned(CCWL) and
reversal drive ban(CWL)
L100
Digital input DI1 function
1
1
DI1Set to servo on
L130
Digital output DO1 function
1
1
DO1Set to servo ready
Position the related parameters instructions:
Parame
ters
Designation
Range
Set Value
Unit
Apply
L029
Instructions pulse electronic
gear 1 molecules
1
~
32767
1
-
P
Chapter 5 Commissioning operation
ADSD-S-S
42
L030
Instructions pulse electronic
gear denominator
1
~
32767
1
-
P
L031
Instructions pulse electronic
gear 2 molecules
1
~
32767
1
-
P
L032
Instructions pulse electronic
gear 3 molecules
1
~
32767
1
-
P
L033
Instructions pulse electronic
gear 4 molecules
1
~
32767
1
-
P
L035
Instructions pulse input
methods
0
~
2
0
-
P
L036
Instructions pulsed input
pulse direction
0
~
1
0
-
P
L037
Instructions pulse input
signal logic
0
~
3
0
-
P
L038
Instructions pulse input
signal filter
0
~
21
7
-
P
L039
Instructions pulse filtering
model
0
~
1
0
-
P
L040
Instructions exponential
smoothing filter time
0
~
1000
0
ms P
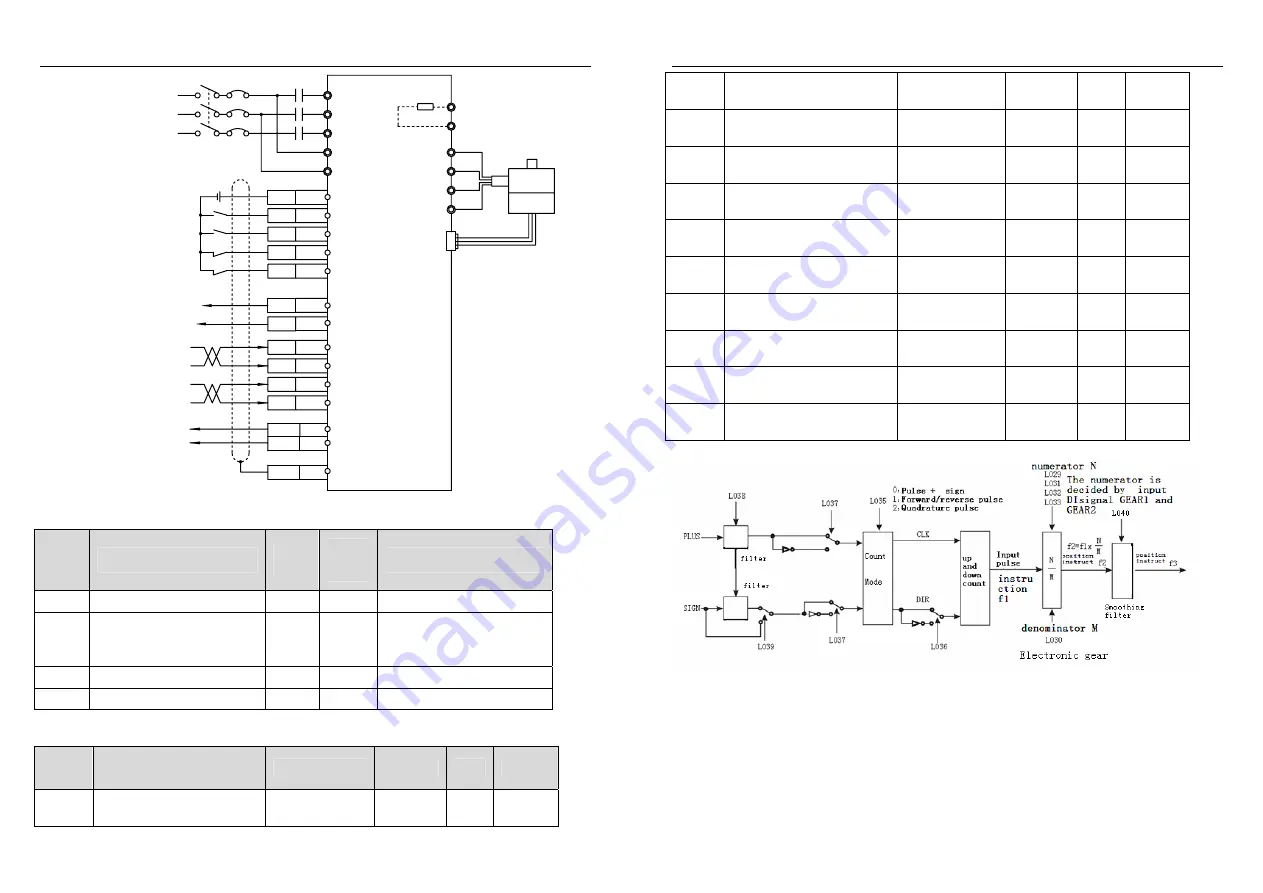
5-2-3 Instructions pulse transmission path
5-2-4 Instructions pulse input methods
Input methods are
determined by
L035 parameter. Through L037 to set the input signal PULS
and SIGN phase and used to adjust the count.L036 parameter used to change count direction.
Pulse instruction mode:
1) Pulse + direction(L035 parameter set as 0)







































































