





























Chapter 5 Function parameter
112
Ch
ap
ter 5
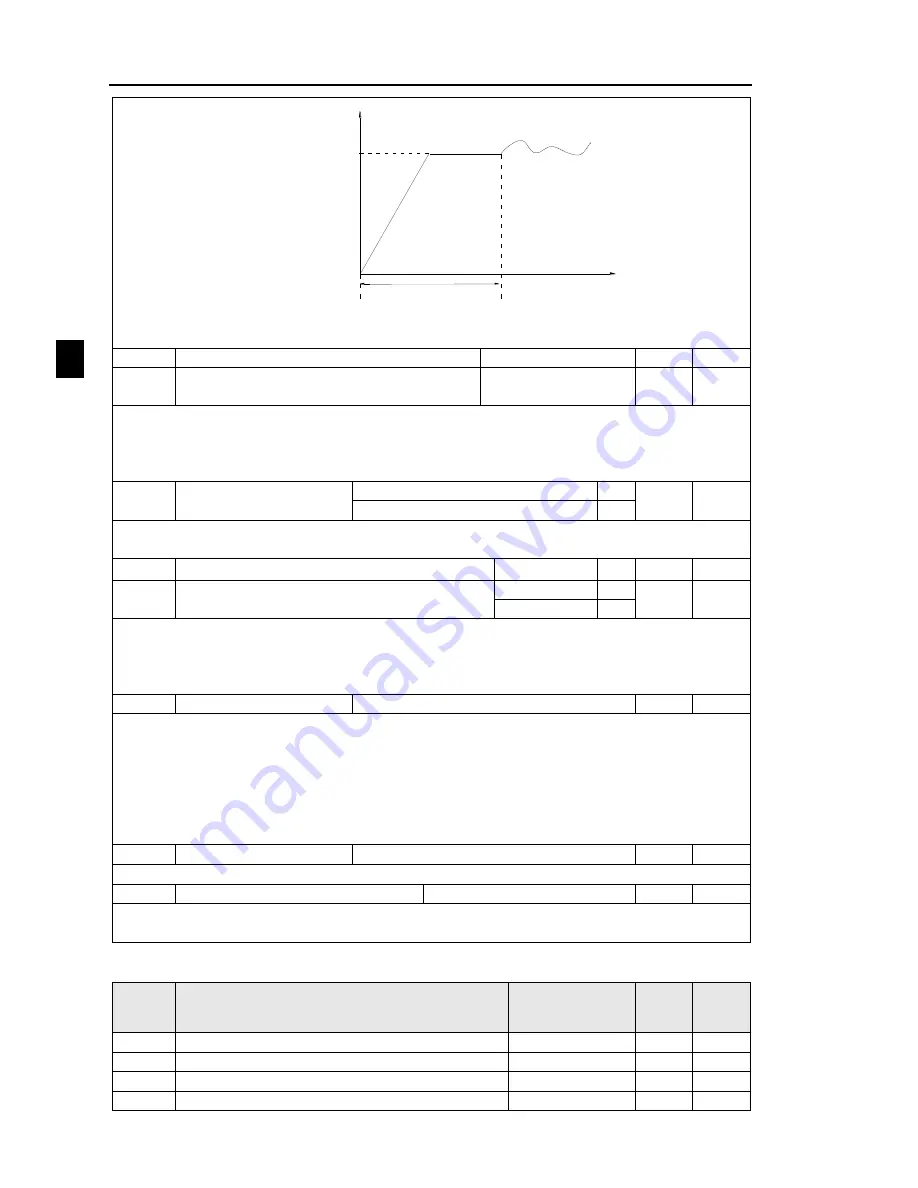
PID initial value
E2.23
Time(t)
Output frequency(Hz)
PID initial value hold
time E2.24
Diagram 5-34:functional schematic of PID initial value.
E2.25 Maximum deviation of twice outputs(forward) 0.00% to 100.00%
1.00%
☆
E2.26
Maximum deviation of twice
outputs(backward)
0.00% to 100.00%
1.00%
☆
This function is used to limit the deviation between two PID output beats(2ms/beats), in order
to suppress the too fast changes of PID output so that stabilizing the inverter operation.
E2.25 and E2.26 respectively corresponds to the maximum of the absolute value of output
deviation when rotating forward and reverse.
E2.27
Computing status after
PID stop
stop without computing
0
1
☆
stop with computing
1
Used to select whether to continue computing in the state of PID shutdown. Generally, PID
will stop computing in the state of shutdown.
E2.28 Reserved
E2.29 PID automatic deceleration frequency option
Invalid
0
0
☆
valid
1
PID feedback value equal to the given value, the inverter frequency is reduced effectively.
When PID frequency effectively reduced, frequency converter detection time interval E2.31
reduced frequency, every time decrease frequency of 0.5 Hz, if in the process of reducing
frequency feedback value is less than the given value, inverter speed up directly to the set value.
E2.30 PID stop frequency
0Hz to Max frequency (F0.19)
25Hz
☆
The function code only in automatic frequency reduction (E2.29) when selecting effective
use.
Feedback value is greater than the given value of frequency converter, inverter frequency
reduction to PID (E2.30) stop frequency, the PID testing number began to count, every PID
detection time (E2.31) a number of times, when the count reaches the PID testing number (E2.32),
the inverter is slowing down. If in the counting process, feedback value is less than the given
value, the inverter directly to accelerate the operation to the set frequency.
E2.31 PID detection time
0s to 3600s
10
☆
PID frequency effectively reduced, used to detect the time of frequency decline
E2.32 PID detection number
10 to 500
20
☆
This function relate to the stop frequency setting of PID, the inverter will decelerate and stop
when the detective time set reach.
5-2-18.
Virtual DI
、
Virtual DO: E3.00 - E3.21
Code
Parameter name
Setting range
Factory
setting
Change
limits
E3.00 Virtual VDI1 terminal function selection
0 to 50
0
★
E3.01 Virtual VDI2 terminal function selection
0 to 50
0
★
E3.02 Virtual VDI3 terminal function selection
0 to 50
0
★
E3.03 Virtual VDI4 terminal function selection
0 to 50
0
★







































































