





























PreciseFlex_Robot
28
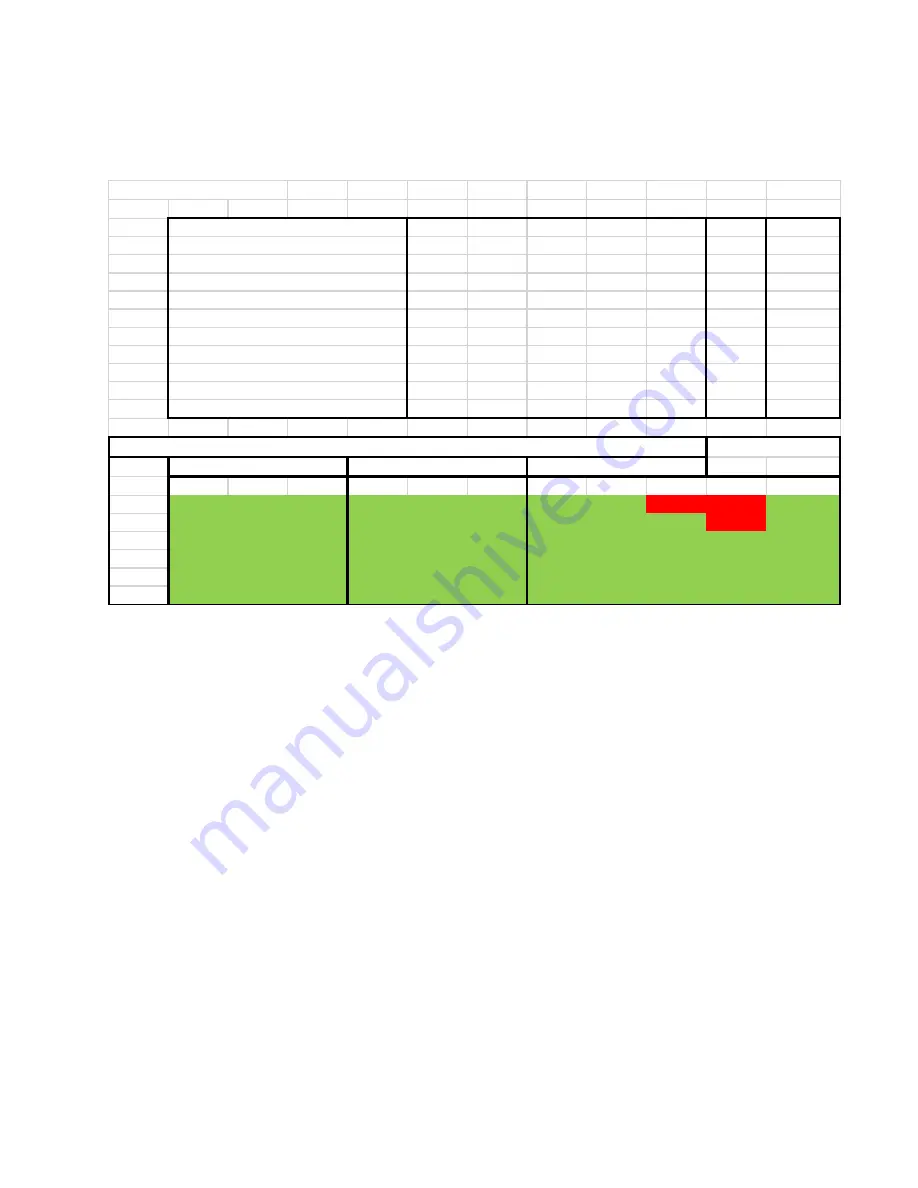
Collision Force Table for PF3400
PAC
Files
PreciseFlex
3400S
170713
J1
J2
J3
J4
J5
Rail
XYZ
4000
12000
14000
9000
0
NA
‐
2600
‐
12000
‐
14000
‐
9000
0
0
7077
27702
24279
14837
6356
22933
37%
43%
58%
61%
100%
100%
50
‐
52
113
‐
61
102
‐
230
44
‐
1
66
‐
334
102
NA
500mm/s 90deg/s 720deg/s 720deg/s 400mm/s 750mm/s
1800
1100
1200
4000
10000
1000
500
2000
Speed
100%
40%
X
cart
Y
cart
‐
Z
1kg
X
cart
Y
cart
‐
Z
1.0kg
X
cart
Y
cart
J2
rot
‐
Z
1.0kg
‐
Z
1.0kg
100%
20
30
95
85
85
100
105
138
223
234
164
80%
21
29
90
64
82
100
89
114
149
195
139
60%
20
24
88
50
51
100
72
94
116
155
118
40%
19
21
81
34
28
96
50
70
87
121
104
20%
17
20
75
18
24
85
23
41
47
105
92
5%
16
12
72
18
23
93
16
22
19
80
77
Z
deceleration
%
Manual
Control
Free
Space
Collision
Rigid
Surface
Collision
Config
for
J2
Rotation
(max
velocity)
100%
Joint
Speed
100%
Joint
Accel
100%
XYZ
Speed
100%
XYZ
Accel
PF400
Collisions
at
Gripper,
50mm
programmed
interference
Standard
Config
for
crash
tests
Configuration
10351
10352
Peak
current,
tcnts
PID
Error
(10352)
%
of
peak
Summary of Contents for PF3400
Page 8: ......
Page 32: ...PreciseFlex_Robot 24 Appendix B TUV Verification of PF400 Collision Forces...
Page 33: ...Introduction to the Hardware 25...
Page 34: ...PreciseFlex_Robot 26...
Page 35: ...Introduction to the Hardware 27...
Page 37: ...Introduction to the Hardware 29 Appendix C Table A2 from ISO TS 15066 2016...
Page 38: ...PreciseFlex_Robot 30 Table A2 Continued...
Page 41: ...Introduction to the Hardware 33 PF400 500gm Safety Circuits PF3400 3kg Safety Circuits...
Page 45: ...Installation Information 37...
Page 46: ...PreciseFlex_Robot 38...
Page 47: ...Installation Information 39...
Page 48: ...PreciseFlex_Robot 40...
Page 54: ...PreciseFlex_Robot 46 Schematic System Overview...
Page 55: ...Hardware Reference 47 Schematic FFC Boards Revision B PF400...
Page 56: ...PreciseFlex_Robot 48...
Page 57: ...Hardware Reference 49 Schematic FFC Boards Revision C PF400...
Page 58: ...PreciseFlex_Robot 50 Schematic FFC Boards 3kg PF400...
Page 59: ...Hardware Reference 51...
Page 60: ...PreciseFlex_Robot 52 Schematic Safety System Overview PF400 CAT3...
Page 61: ...Hardware Reference 53...
Page 62: ...PreciseFlex_Robot 54 Controller Power Amplifier Connectors Control Board Connectors...
Page 63: ...Hardware Reference 55 Gripper and Linear Axis Controller Connectors...
Page 64: ...PreciseFlex_Robot 56...
Page 65: ...Hardware Reference 57...
Page 66: ...PreciseFlex_Robot 58 Schematic Slip Ring for 60N Gripper...
Page 67: ...Hardware Reference 59...
Page 68: ...PreciseFlex_Robot 60...
Page 69: ...Hardware Reference 61...
Page 70: ...PreciseFlex_Robot 62...
Page 71: ...Hardware Reference 63...
Page 72: ...PreciseFlex_Robot 64...
Page 73: ...Hardware Reference 65 Motor 60N Gripper...
Page 74: ...PreciseFlex_Robot 66...
Page 106: ...PreciseFlex_Robot 98 b The CALPP application takes about 1 minute to run...
Page 124: ...PreciseFlex_Robot 116 Wiring for 60N Gripper with Battery Pigtail Wiring for Pneumatic Gripper...
Page 125: ...117 Wiring for Vacuum Gripper Wiring for Vacuum Pallet Gripper...

































































