



























QBSOFTHAND RESEARCH USER MANUAL —
9
On the
right, there
is the Tool Coordinate
System,
Σ
T
(O
T
; X
T
, Y
T
, Z
T
)
, of the SoftHand. The
center,
O
T
,
coincides with the center of mass of the hand and its position is defined by the distance
from
O
M
.
The
Z
T
axis
is normal to the palm, outgoing positive, and
the
Y
T
axis
follows the proximal-distal direction and
orientation. This definition implies
that
Σ
T
is
the same for left and right SoftHands. So, the positive
orientation
of
X
T
axis
will be on the side of the thumb in the right hand and on the side opposite to the
thumb in the left hand.
3.3 Mechanical characteristics
MINIMUM
NOMINAL
MAXIMUM
Pinch grasping payload
[kg]
—
0.83
1.10
Power grasping payload
[kg]
—
1.70
2.10
Hanging payload
[kg]
—
10
30
Pinch grasping force
[N]
—
10
11
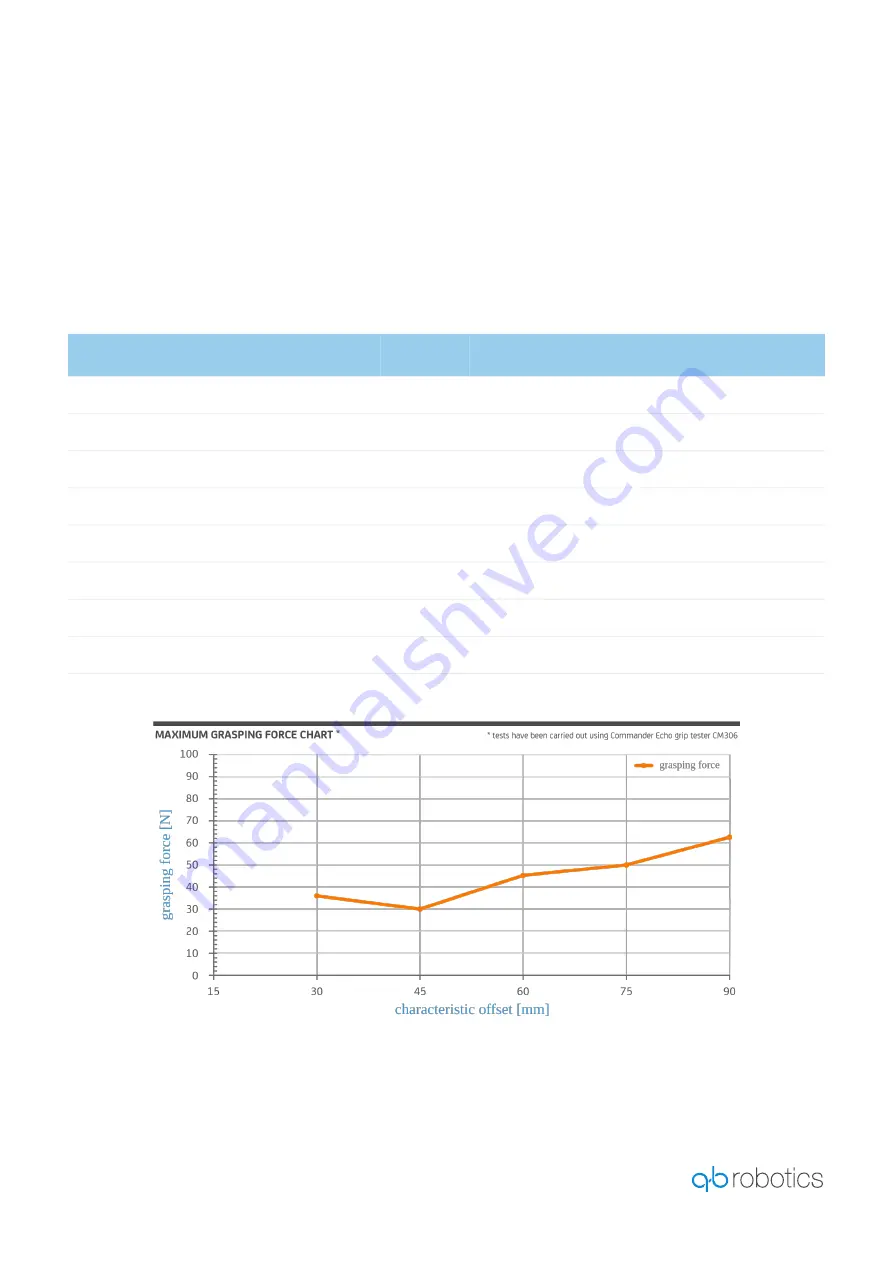
Power grasping force
[N]
—
46
62
Grasping time
[s]
—
—
1.1
Releasing time
[s]
—
—
1.1
Look at the graph for details.
Figure 3. —
Maximum grasping force chart







































































