





























16
—
MOUNTING AND WIRING
GENERAL MANUAL — SEP 8, 2022 — RELEASE: V1.1.0
INSTRUCTIONS
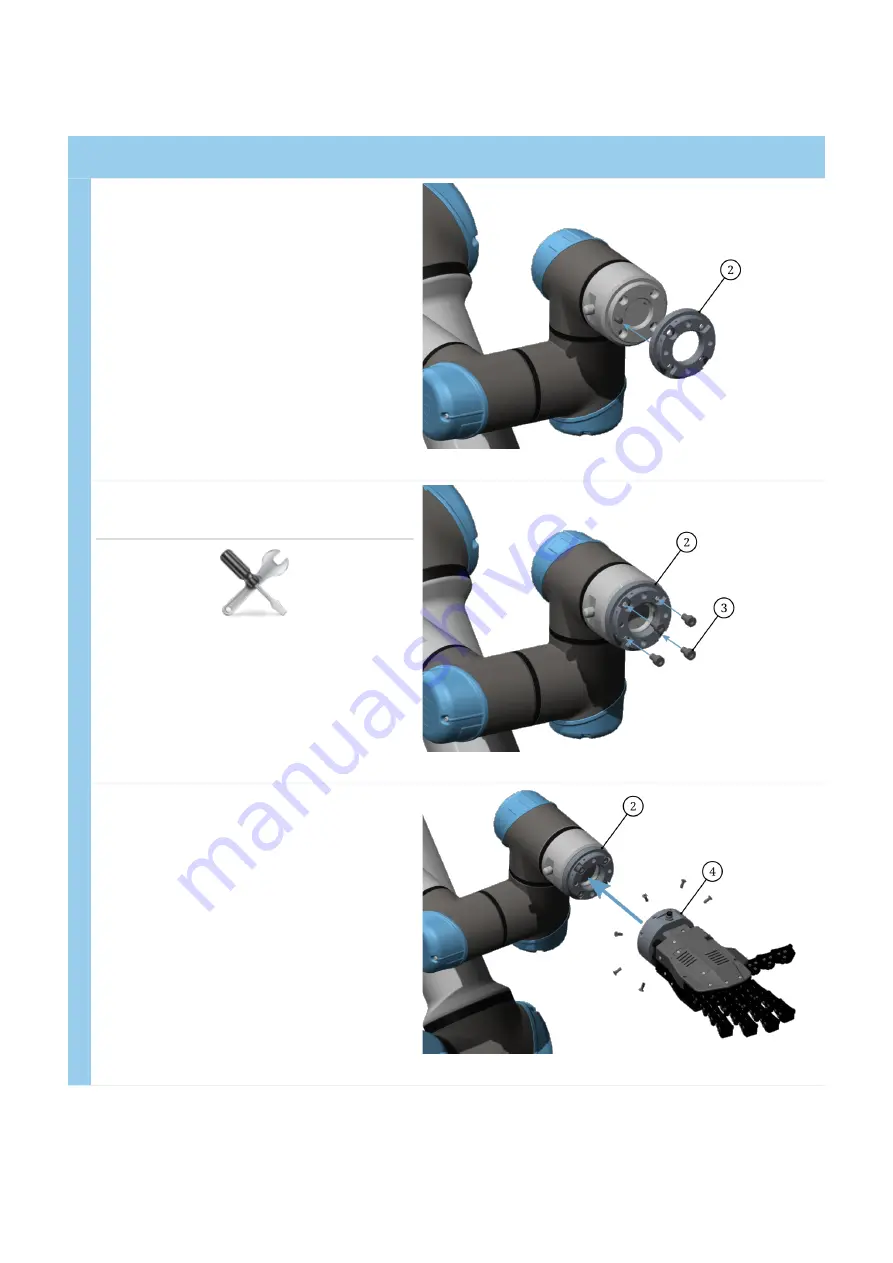
2
Center (2) on the wrist diameter 63 mm,
taking care that the cylindrical pin (1) fits
into one of the four d6 reamed through
holes.
3
Fasten (2) to the robot wrist by tightening
the four screws (3).
You need the 5 mm Allen wrench.
4
Center (4) on the diameter 63 mm of (2),
taking care that the plug fits into one of the
four d6 mm through holes.





































































