





























28
—
SOFTWARE
13
https://wiki.ros.org/qb_device_driver
GENERAL MANUAL — SEP 8, 2022 — RELEASE: V1.1.0
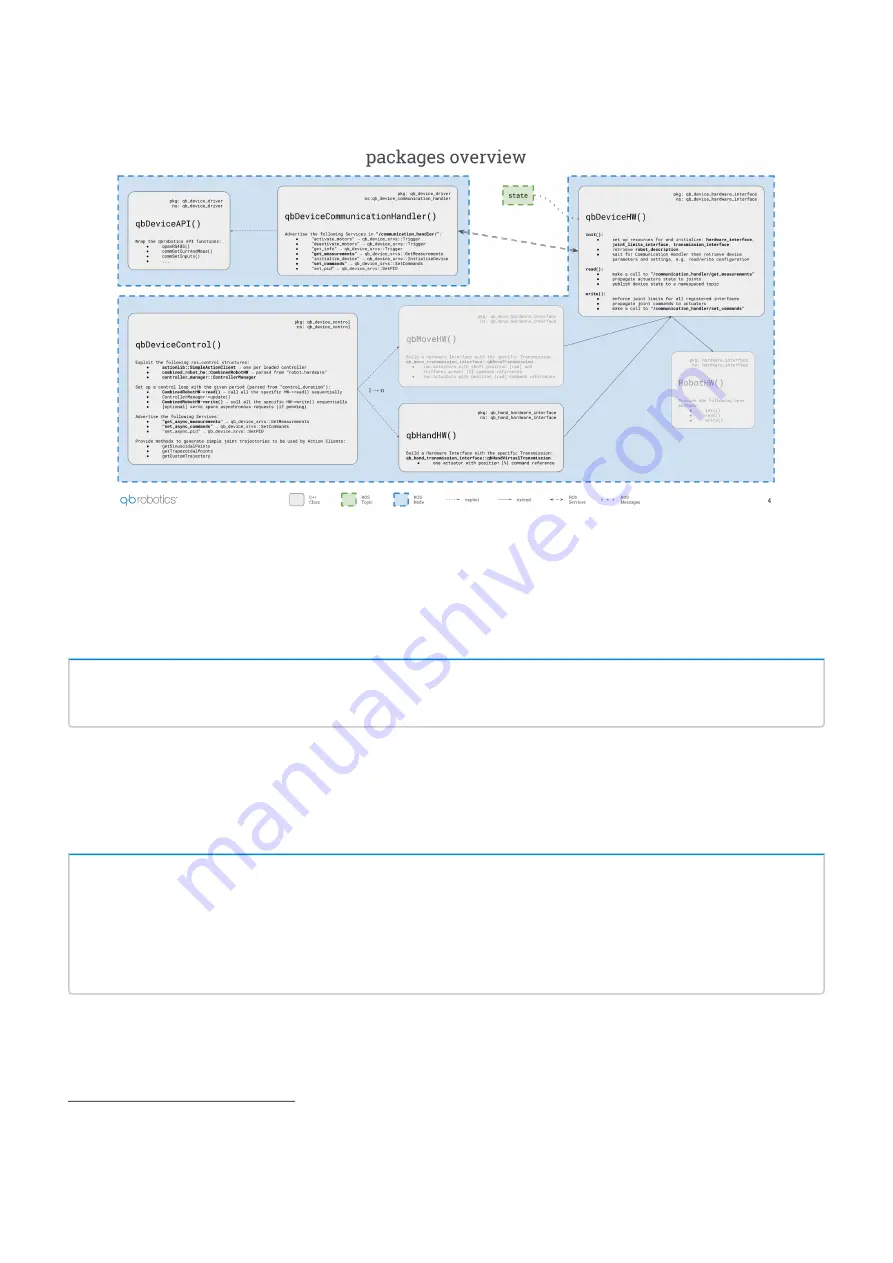
Figure 10. —
qb SoftHand ROS packages and classes overview
Communication Handler
The Communication Handler Node has no parameters to be set, therefore it is always launched like this:
roslaunch qb_device_driver communication_handler.launch
On start, it scans the serial communication resources connected to your system and shows a list of the
devices it has found. By default, it never scans again for new devices, apart from asking it explicitly
during the initialization of a control Node.
This is a simple example when starting the Communication Handler with two
qbrobotics
devices
connected on two distinct USB ports:
[ INFO] [1524044523.511369300]: [CommunicationHandler] handles [/dev/ttyUSB1].
[ INFO] [1524044524.426984697]: [CommunicationHandler] handles [/dev/ttyUSB0].
[ INFO] [1524044525.218613760]: [CommunicationHandler] has found [2] devices connected:
[ INFO] [1524044525.218696997]: - device [1] connected through [/dev/ttyUSB0]
[ INFO] [1524044525.218736612]: - device [2] connected through [/dev/ttyUSB1]
When the Communication Handler is on, it provides all the Services required to interact with the
connected devices: e.g.
get info or measurements, activate or deactivate motors, set commands
, and even
more... A detailed description of the services can be found in the
package wiki.







































































