















8
6 marzo 2018
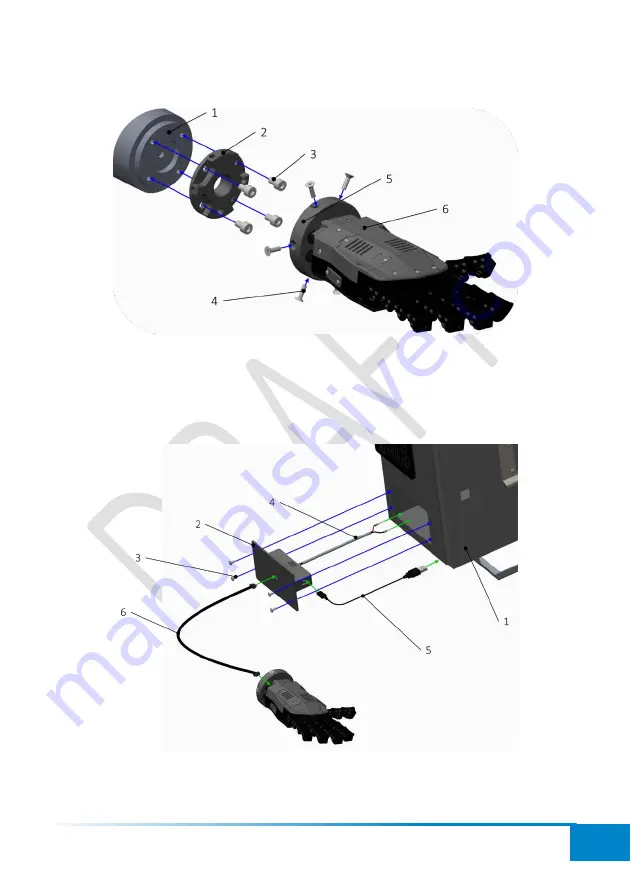
iii.
Fasten ISO 9409-1-50-4-M6 flange adapter to the hand wrist interface using
n.5 M4x12 screws (4).
Figure 4.1 SoftHand research assembly scheme on the robot. 1) robot tool flange; 2) ISO 9409-1-50-4-M6
flange adapter; 3) M6x10 screw (n. 4 pcs.); 4) M4x12 screw (n. 5 pcs.); 5) hand wrist interface; 6) SoftHand
research.
4.2
cable connections
Figure 4.2 Scheme of cable connections between the qb SoftHand research and the UR. The blue arrows
are mechanical connections while the green ones are electric. 1) UR control box; 2) qb dummy; 3) control
box plate screws; 4) power cable; 5) USB cable; 6) main cable.







































































