















9
6 marzo 2018
To connect the hand to the UR’s control box, please follow
the instructions:
i.
Open one of the two windows that are on the UR control box (1) by loosening
the 4 screws (3) (use the t15 screwdriver);
ii.
Insert the qb dummy (2) in the slot opened and fasten it to the control box by
the same screws (3) (use the t15 screwdriver);
iii.
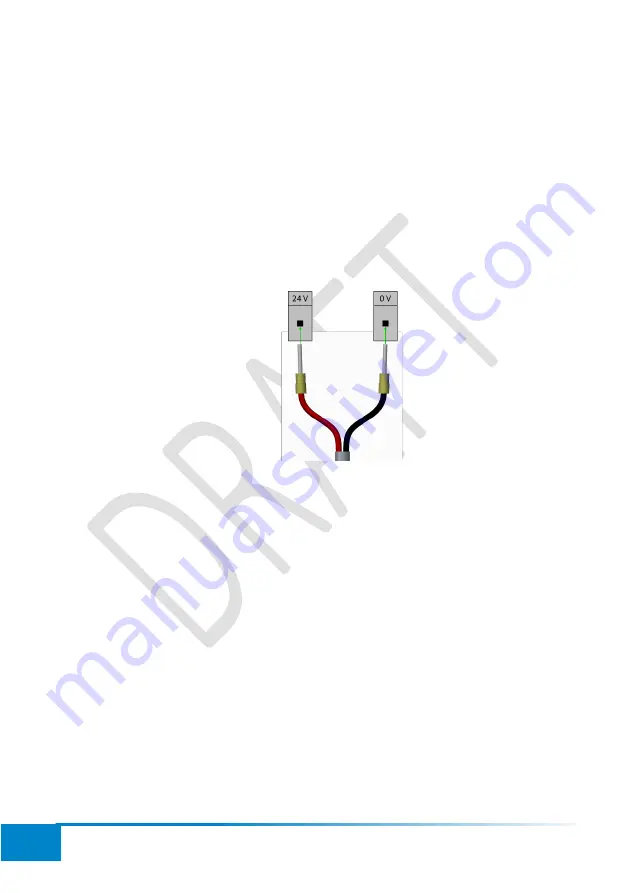
Use the power cable (4) to power the qb
dummy from the UR’s control box
(1): connect the black cable to the 0V and the red cable to the 24V (see Figure
4.3);
Figure 4.3 detail of the connection of the power cable to the 24V power supply inside the UR control box.
iv.
Connect the qb dummy (2) to the
USB port of the UR’s controller box
(1) by
the USB cable (5);
v.
Connect the main cable (6) between the qb dummy (2) and the SoftHand
research.
4.3
Software upload to UR controller
To upload the qb SoftHand URCap plugin insert the USB pendrive into the USB slot of
the Teach Pendant.
4.4
URCap plugin installation
Install the file
qbsofthand-2.0.0.urcap
from the USB pendrive, following the
procedure indicated in the
Par. “URCaps Setup” on the
UR User Manual.







































































