




















39
28 aprile 2021
5.1
Tool tips
In this paragraph, you can find some basic advices to correctly assemble a robot using the
qbmove kit, avoiding unwanted behaviors of the assembled robot and let the user using it safely.
For a smart assembly, you must read with attention the chapter 2, primarily the technical data.
The qbmove is a back drivable actuator. When the robot is off, a sufficiently
high external load can move the output shaft.
5.1.1
Payload evaluation and assembly examples
The payload of the assembled robot will depend on the actuator’s torque, on the masses, on the
distances and accelerations.
Before starting the assembly, you must decide which type of robot you want to build and make
proper mechanical considerations about the workspace, the dynamics and the payload. A wrong
assembly can drastically reduce th
e robot’s payload when
near the limits of the workspace.
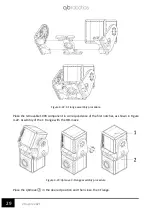
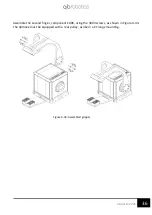
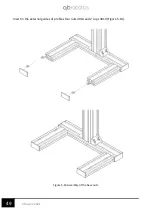
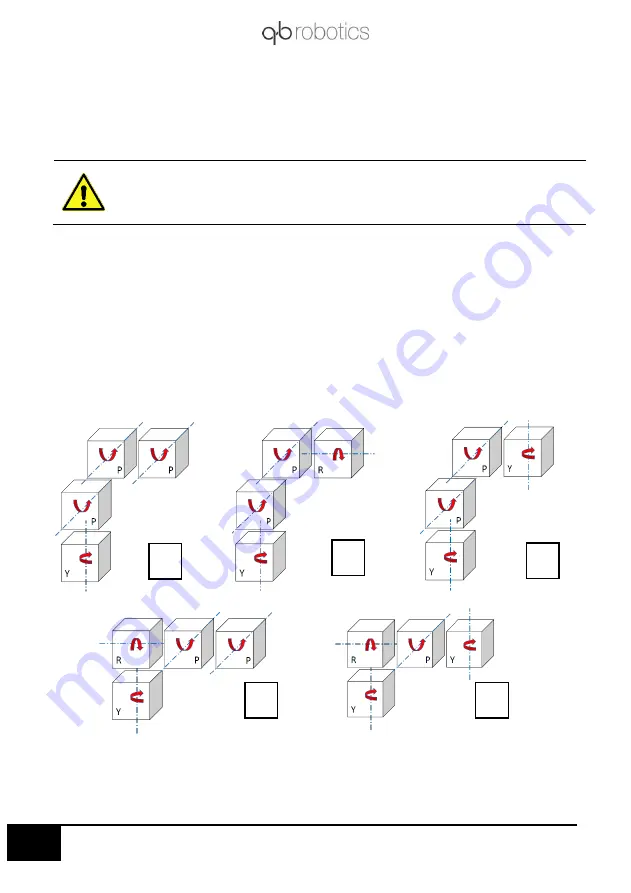
Figure 5-1 shows some schematic examples of assembly. Usually the axis of the first joint is
vertically placed to circularly explore the workspace of your robot.
Figure 5-1: Different types of assembly examples
1
2
3
4
5
Summary of Contents for qbmove Advanced Kit
Page 2: ...www qbrobotics com ...
Page 15: ...12 28 aprile 2021 Figure 3 7 Snap on mechanism Figure 3 8 Examples of connection ...
Page 40: ...37 28 aprile 2021 ...
Page 63: ...60 28 aprile 2021 IMPORTANT Remember to power the qbmove or the chain before using it ...
Page 97: ...94 28 aprile 2021 This page was intentionally left blank ...

































































