





























SOFTCLAW —
23
https://wiki.ros.org/combined_robot_hw
•
•
Device Setup
Connect a
qb SofClaw
to
your system is basically a matter of plugging in a USB cable. Nonetheless,
read
carefully
the manual to understand all the requirements and advice about either single-device or
chained configurations.
6.1.2 Usage
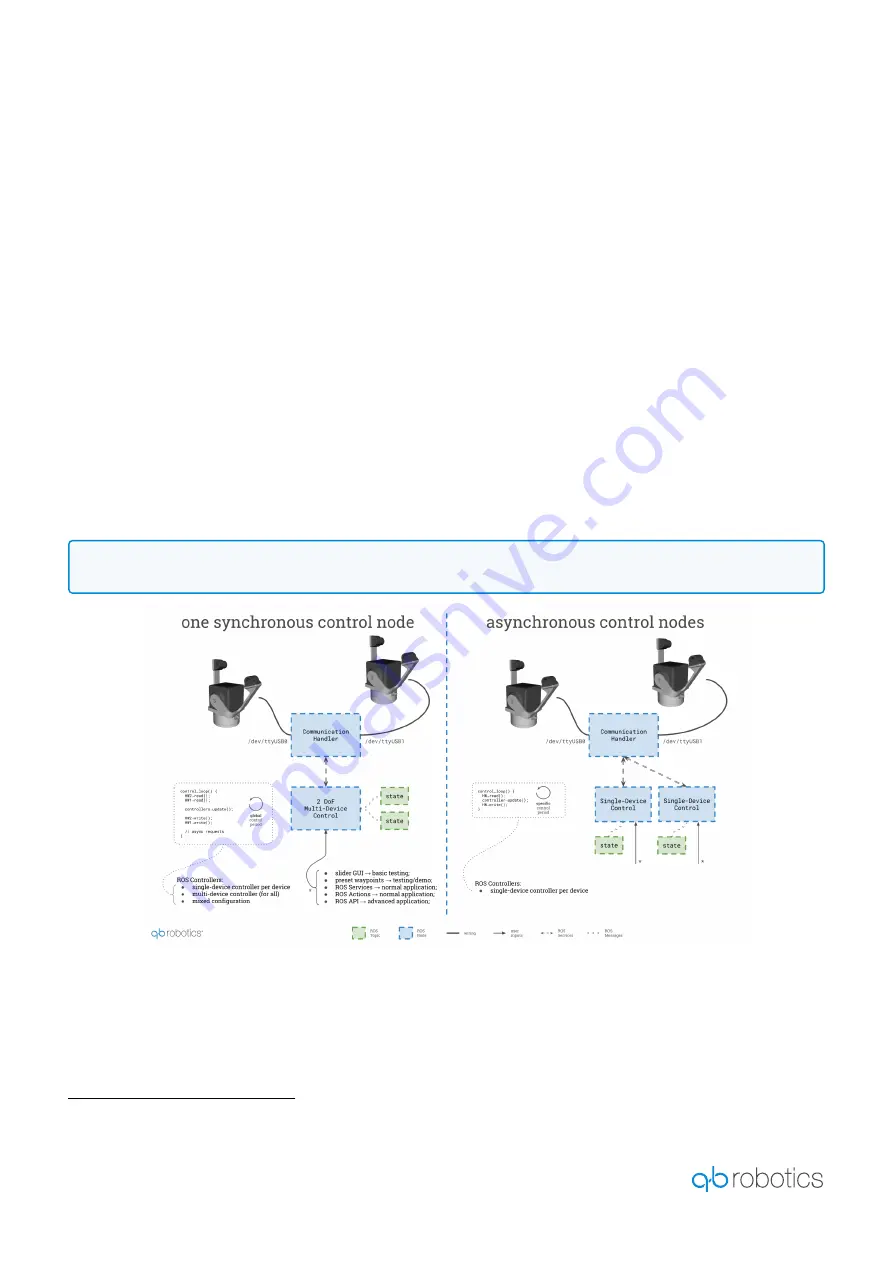
As shown in the following picture there are two distinct configurations to control several
qb
SoftClaw
devices
connected to the system:
The first (and recommended) groups all the Hardware Interfaces together (thanks to the
10
) and exploits them as a unique robot system. We have called it
"synchronous"
just to point out that every sequence of reads and writes is always done in the same predefined order.
The second mode threats every device as an independent Hardware Interface with its dedicated ROS
Node which executes the control loop independently w.r.t. the rest of the system, i.e.
"asynchronously"
.
Mixed configurations can be also achieved through a proper setup. In such a case we can think of
synchronous sub-systems which execute asynchronously w.r.t. each other.
Figure 5. —
qb SoftClaw ROS control mode schemes
In both cases there is always one central Node which manages the shared resources for the serial
communication (e.g. one or many USB ports) and which provides several ROS services to whom wants to
interact with the connected devices. This Node is called
Communication Handler
and it is usually started
in a separate terminal.
In a single-device system the synchronous mode is a
nonsense.






































































