





























Chapter 6 Robot Operation
Document Version V1.1.0(01/11/2023) 101
For details of QRL program content, please
refer to the "QKM Robot (QRL Language)
Programming Manual".
7.5.4 Introduction to "data.qlv"
"data.qlv" is the robot motion point and motion parameter setting file.
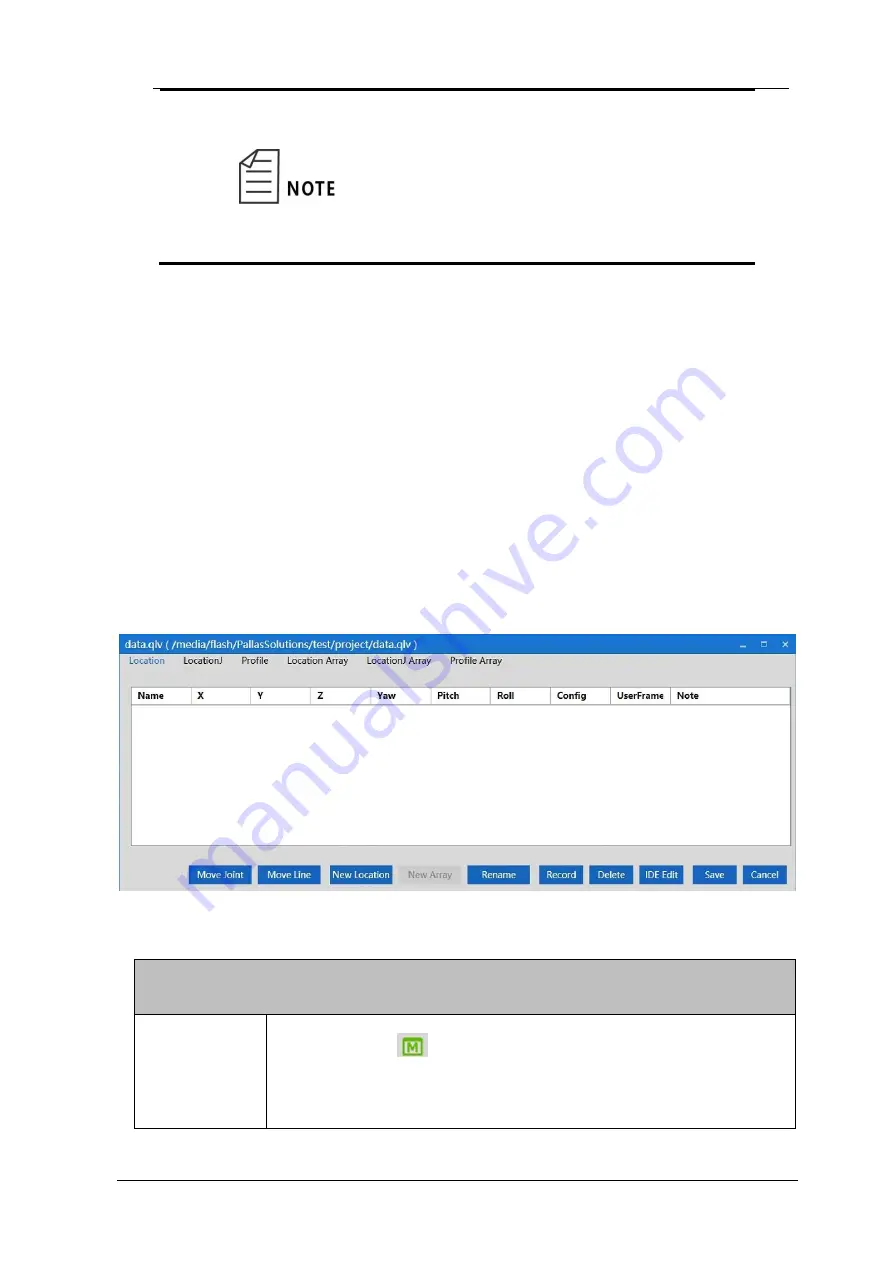
Double-click to open the "data.qlv" file, and the "data.qlv" interface will
pop up, as shown in Figure 7-32. The interface contains: Location,
LocationJ, Profile, Location Array, LocationJ Array, Profile Array. It is an
interface of setting robot motion point information and motion
parameter information.
Figure 7-32 "data.qlv" interface
Introduction to Buttons
Move Joint
Switch to the
pattern to control the joint movement of
the robot to the selected point position




































































