





























Chapter 6 Robot Operation
Document Version V1.1.0(01/11/2023) 103
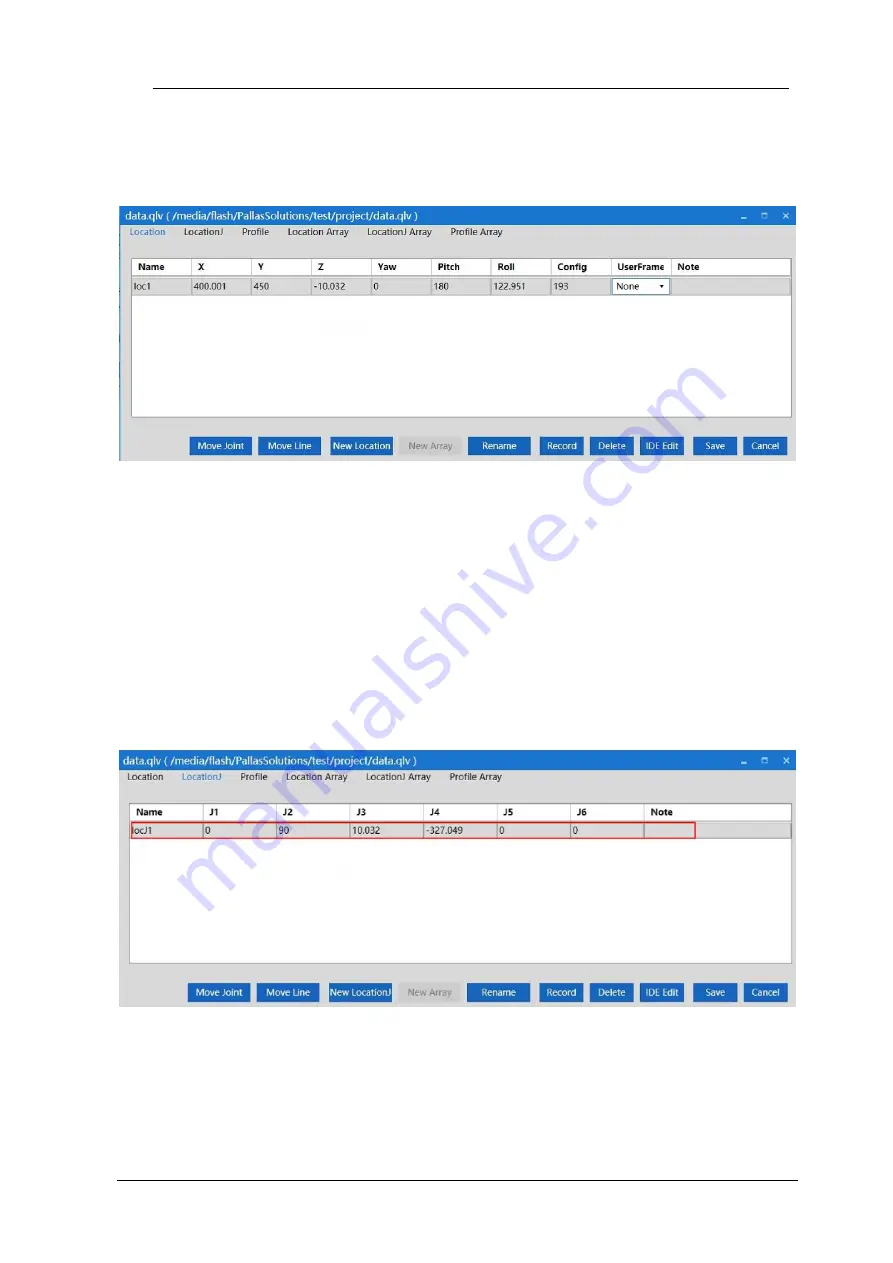
the interface. The point name is the default name, and you can click
Rename to modify it, as shown in Figure 7-33.
Figure 7-33 New Location
Step 2
New LocationJ; Click "New Location" in "LocationJ", and the point
information of the current robot’s axis coordinate position will
appear in the interface. The point name is the default name, and you
can click Rename to modify it, as shown in Figure 7-34.
Figure 7-34 New LocationJ
Step 3
New Profile; Click "New Profile" in "Profile", and the default motion
parameter information will appear in the interface. The motion







































































