





























41
8.4 SoftGate more reliable & easier to use than Ad-Hoc networks
Ad-Hoc networks allow users to create a simple wireless network without the use of
an access point. However, there are several drawbacks when relying on ad-hoc
networks for wireless networking:
1: Ad-Hoc networks do not use the normal packet collision avoidance
technique (RTS/CTS) because of the “False Blocking” problem.
802.11 networks deploy a packet collision avoidance mechanism called RTS/CTS
(Ready to Send / Clear to Send). Although the mechanism works well in
infrastructure mode (or AP mode), the de-centralized nature of ad-hoc networks
renders them incompatible with RTS/CTS. When used in conjunction with ad-
hoc networks, RTS/CTS dramatically decreases overall throughput due to a
“false blocking” problem. Hence, most ad-hoc networks do not use the RTS/CTS
mechanism.
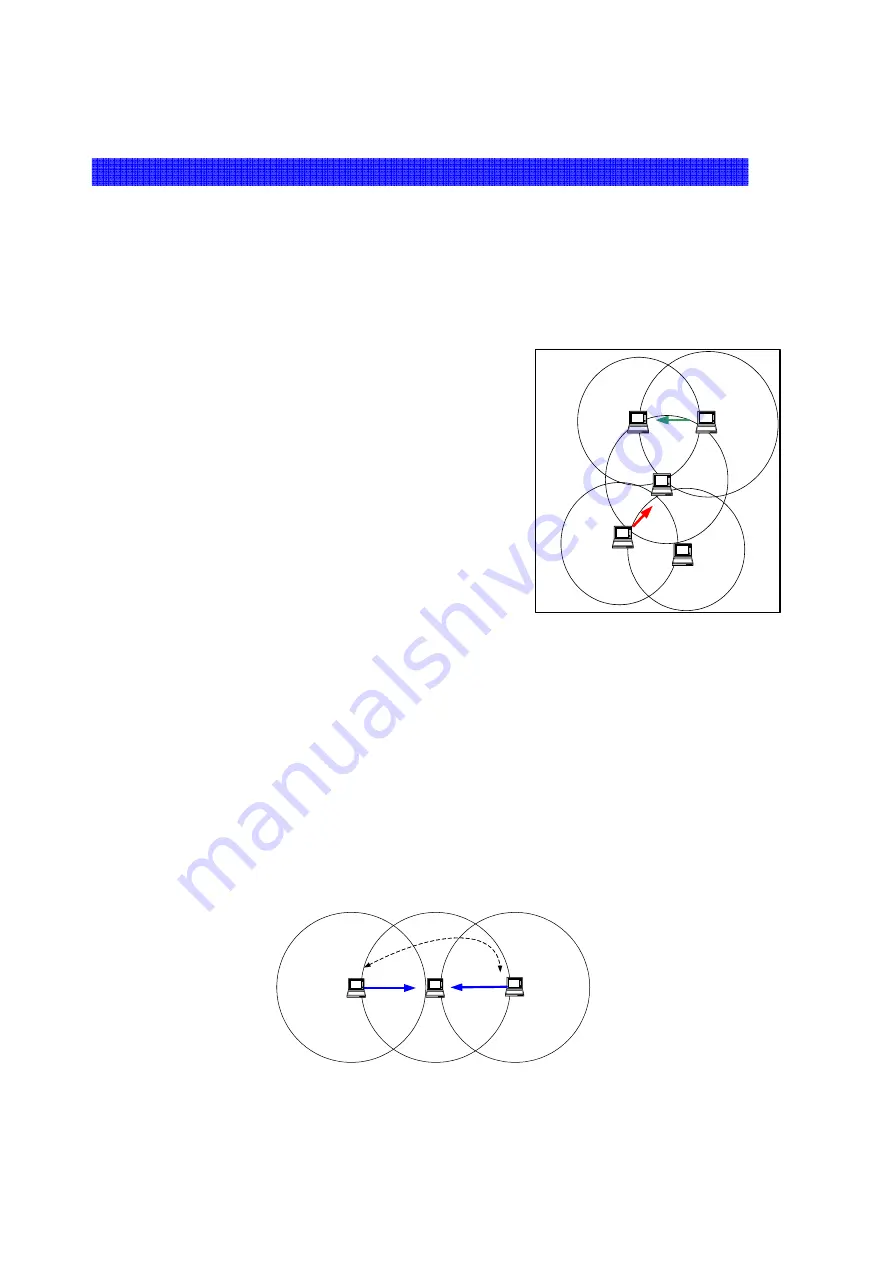
Figure (1) illustrates the “false blocking” problem. Node ‘B’ is attempting to
communicate with node ‘A’ so node ‘B’ therefore broadcasts an RTS packet,
which places node ‘C’ in a “blocked” mode. This prevents ‘C’ from attempting to
send packets while ‘A’ and ‘B’ is communicating, as such attempts to send would
interrupt their connection.
At the same time, node ‘D’ wants to communicate with node ‘C’ so node ‘D’
broadcasts an RTS packet. Node ‘D’ does not receive a CTS message from node
‘C’ because node ‘C’ has been blocked from sending packets by the RTS packet
that was broadcast by node ‘B.’ Node ‘D’ therefore enters a backoff period, and
its capacity to communicate has been hindered.
Thus, node ‘D’ is unnecessarily blocked from communication with node ‘C.’ There is no real channel contention between nodes
‘C’ and ‘D,’ but the problem of “false blocking” thwarts their attempts to communicate. The problem of “false blocking” has
further implications. Node ‘E’ is also blocked from communicating when node ‘D’ sends its RTS packet, and so on.
2. Because ad-hoc networks do not use RTS/CTS they are susceptible to
the “hidden node” problem, which increases the number of collisions in
the network.
Figure (2) shows that in an ad-hoc network, node ‘A’ cannot “hear” node ‘C’ because node ‘B’ is positioned between them, and
because in order to avoid the “false blocking” problem the RTS/CTS mechanism is not being used. Since nodes ‘A’ and ‘C’ are
“hidden” from each other and cannot hear each other, nothing prevents ‘A’ and ‘C’ from transmitting to node ‘B’ simultaneously.
This simultaneous transmission results in collision. In fact, the number of packet collisions in ad-hoc networks rises
exponentially as nodes (computers) enter the network. Packet collisions force a sender to re-send packets, thus increasing
latency (the time that it takes a data packet to move across a network connection), and diminishing overall throughput.
A
B
C
A cant ear?C, Collision occurs
when both transmit to B
?
Figure 2: Blocked Nodes in Ad-Hoc Network
A
B
C
D
E
RTS
Blocked
RTS
Enters a backoff mode
because node c is
blocked.
Blocked
Figure 1: False Blocking Problem
Summary of Contents for SoftGate
Page 25: ...25 Choice the Change Admin Password to change your SoftGate password...
Page 49: ...49 2 1 QUETEC SoftGate PCMCIA PCI USB SoftGate 2 2 SoftGate ME 2000 XP IE SoftGate...
Page 50: ...50 2 3 QUETEC SoftGate PCMCIA USB SoftGate PCI PCI PCI SoftGate softGate...
Page 52: ...52 SoftGate PII 366MHz 128MB ME 2000 XP...
Page 53: ...53 QUETEC SoftGate 2000 XP SoftGate PCMCIA SoftGate SoftGate...
Page 54: ...54 Next Yes No SoftGate Next Express Yes...
Page 55: ...55 PCMCIA USB SoftGate PCMCIA USB...
Page 56: ...56 SoftGate Next Finish SoftGate SoftGate...
Page 60: ...60 QUETEC SoftGate 6 1 SoftGate QUETEC SoftGate SoftGate SoftGate SoftGate SoftGate...







































































