




























1. OPERATION
1-14
•
HEAD UP (TB)
Radar echoes are shown in the same way as in the head-up mode. The difference
from normal head-up presentation lies in the orientation of the bearing scale. The
bearing scale rotates in accordance with the heading sensor signal, enabling you to
know own ship's heading at a glance.
This mode is available when the radar is interfaced with a gyro heading sensor. If
the gyro heading sensor fails, the bearing scale returns to the state of head-up
mode.
•
STERN UP
A display without azimuth stabilization in which the line that connects the center with
the top of the display indicates your stern.
•
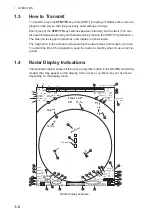
NORTH UP
The north-up mode paints target pips at their
measured distances and in their true (heading
sensor) directions from own ship, north bearing
is fixed at the top of the screen. The heading
line changes its direction according to the
ship's heading. This mode requires heading
signal.
If the compass fails, the orientation mode
changes to head-up and the north marker dis-
appears.
•
COURSE UP
The course-up mode is an azimuth stabilized
display in which a line connecting the center
with the top of the display indicates own ship's
intended course (namely, own ship's previous
heading just before this mode has been select-
ed).Target pips are painted at their measured
distances and in their directions relative to the
intended course, which is maintained at the 0-
degree position. The heading line moves in ac-
cordance with ship's yawing and course
change.
True motion (TM)
•
NORTH UP
Ground (or water mass) is stabilized with compass and speed inputs. Your ship and
other objects in motion move with their true courses and speed.
•
COURSE UP
Own ship and other moving objects move in
accordance with their true courses and
speed. In ground stabilized TM, all fixed tar-
gets, such as landmasses, appear as sta-
tionary echoes. In the sea stabilized TM
without set and drift inputs, the landmass can
move on the screen.
North mark
Heading
line
North mark
Heading
line
North mark
Heading
line







































































