



























Radiolink Electronic Ltd
41
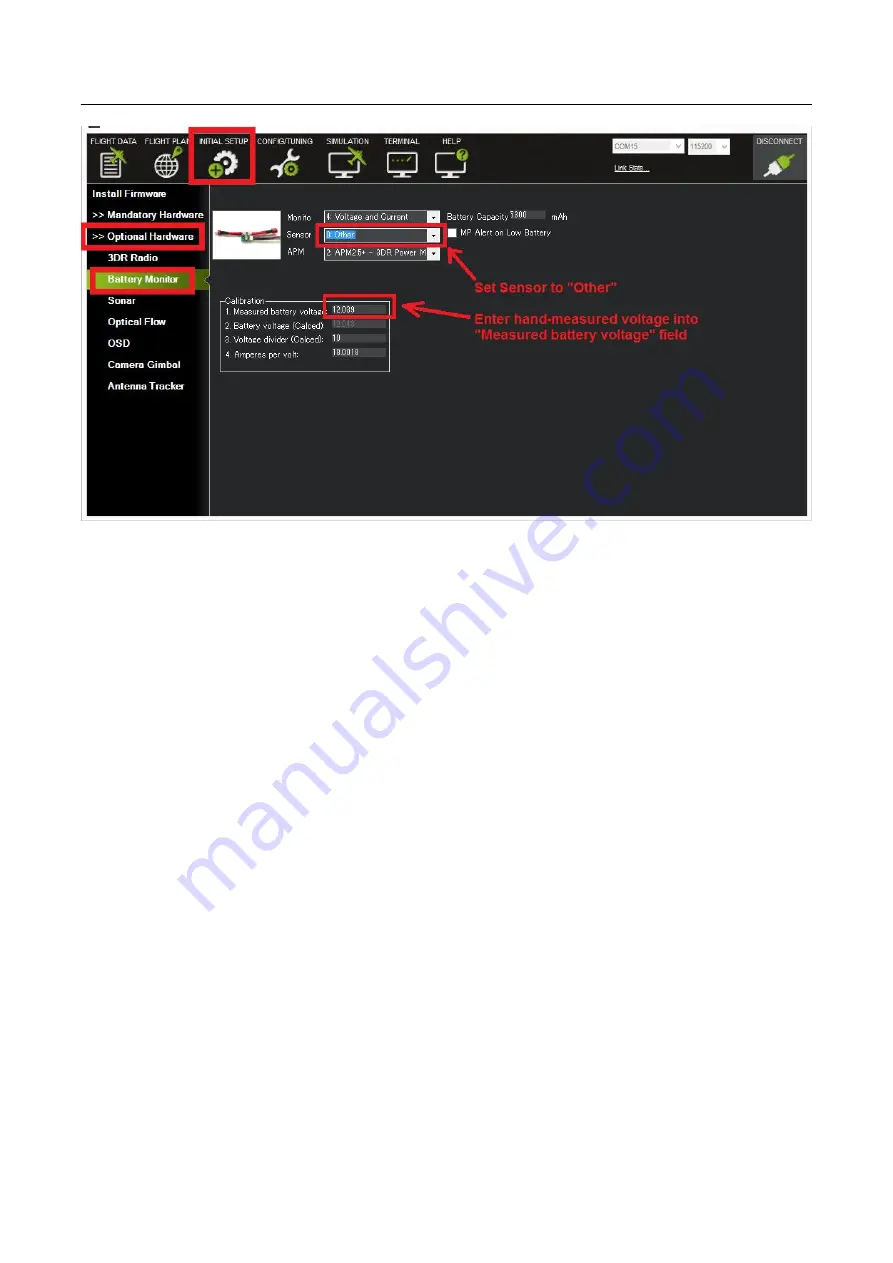
Using the power analyzer you can also measure the current and compare to results displayed in the Mission
Planner.
5.3 LED Indicator, Arming and Troubleshooting
5.3.1 LED Indicator
Blue and red flashing: Initializing
Yellow flashing twice: Error, Arming rejected
Blue flashing: Stabilize, can be armed. Faile to RTL or PosHold
Green flashing: GPS locked, can be armed and take off, RTL
Green always on + a long D sound: Armed and ready to take off
Yellow flashing: Transmitter failsafe activated
Yellow frepeated sounds: Battery failsafe activated
Yellow fHigh/High/Low sounds: GPS data error or GPS failsafe activated
Safety button indicator
Continous flashing quickly: System auto checking
Flashing intervally: System is ready. Press the button to activate the system
Always on: Ready to be armed.
5.3.2 Arming and Disarming
Arming the motors causes ArduPilot to apply power to your motors, which will cause them to start spinning.
Before arming the motors, make sure all people, objects, and any body parts (e.g., hands) are clear of the
propellers. Then do the following:
You can only arm or disarm in Stabilize, ACRO, AltHold, Loiter, and PosHold modes. You cannot arm your
copter in AUTO mode.
1. Turn on your transmitter.







































































