





























Radiolink Electronic Ltd
22
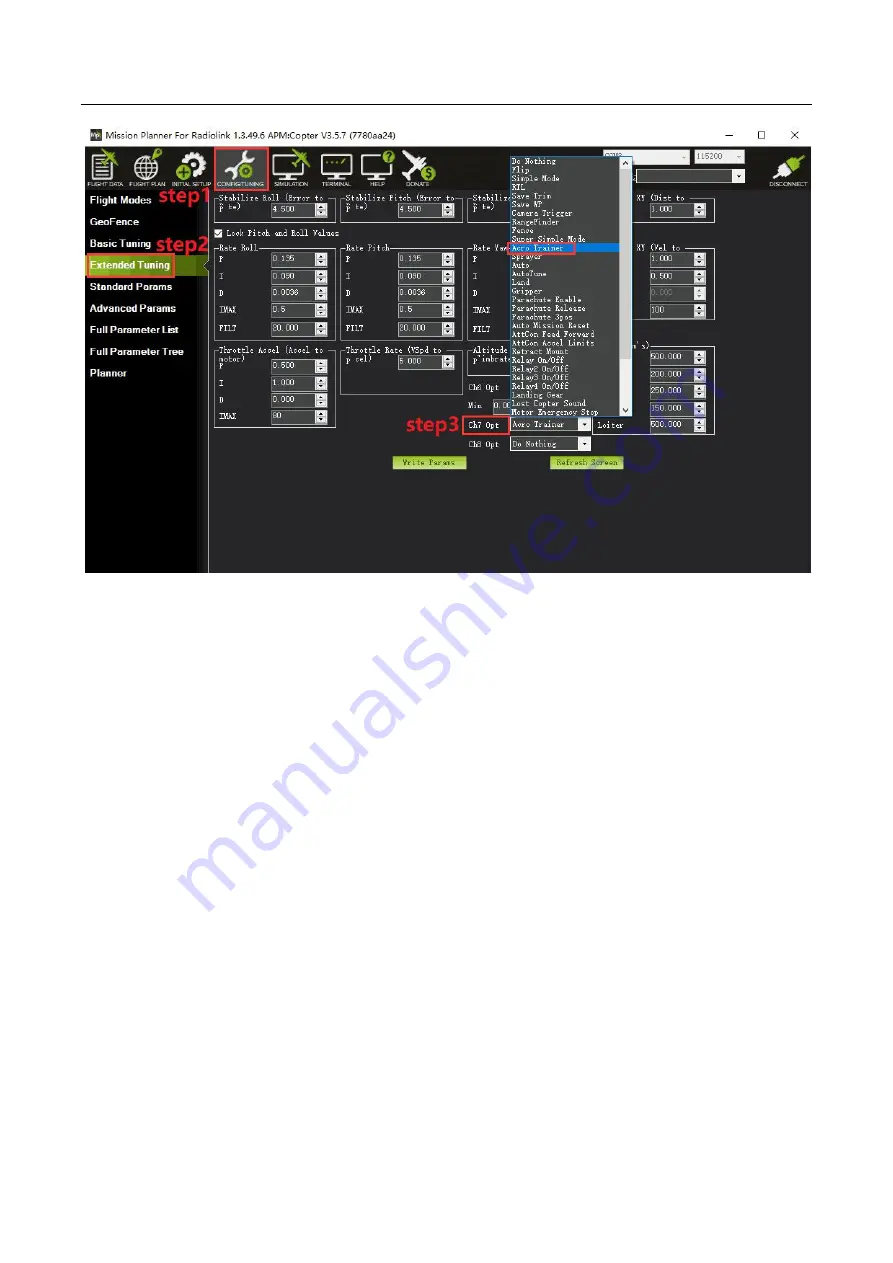
Parameters Setting
ACRO_RP_P
controls the rotation rate for the roll and pitch axis. The default, 4.5, will command a 200deg/sec
rotation rate. Higher values lead to higher rotation rates, lower to slower rotation rates.
ACRO_YAW_P
controls the rotation rate for the yaw axis. The default, 4.5, like roll and pitch, will command a 200deg/sec
rotation rate.
ACRO_RP_EXPO
Acro roll/pitch Expo to allow faster rotation when stick at edges
ACRO_Y_EXPO
Acro yaw expo to allow faster rotation when stick at edges
ACRO_EXPO
is an amount of Exponential to apply to the pilots stick inputs that only applies to ACRO mode.
By default, ACRO mode is much more responsive, even in the center-sticks positions, than the other modes,
so this parameter allows the pilot to fine-tune stick response in the control to match what they feel when they
are in other modes such as Stabilize, AltHold, PosHold, etc. The default value of 0 applies 30% expo to Roll
and Pitch demands from the pilot.
3.6.3 Altitude Hold Mode
In altitude hold mode, Copter maintains a consistent altitude while allowing roll, pitch, and yaw to be controlled
normally. This page contains important information about using and tuning AltHold.
Automatic altitude hold is a feature of many other flight modes (Loiter, Sport, etc.) so the information here
pertains to those modes as well.







































































