





























RADIUS
Product
Description
PDR 121
iom_pdr121_04_r02.doc
Rev 02
Page 21 (67)
8.2 Peer-To-Peer
The PDR 121 offers the feature of peer-to-peer communication. Any PDR 121 unit can
communicate with another, independently from a master unit.
Peer-To-Peer communication is achieved by entering the Peer destination address in the network
configuration menu. See chapter 12.5.
Note!
The control system and the protocol used must support Peer-To Peer communication. Check
this with your control system supplier or contact RADIUS.
8.3 Collision Avoidance
Collision Avoidance is used in systems operating with unsolicited messaging / report by exception,
meaning that it is a not strictly polled, (request/reply), system. If events occur simultaneously at
several RTU’s in an unsolicited system, there is a risk that several radios start transmitting
simultaneously. The radio messages will then be corrupted due to collisions.
Unsolicited response / Report by Exception messages are commonly used by equipment using the
DNP3 protocol.
The Collision Avoidance functionality in the PDR 121 is used to minimize the risk of collisions at
simultaneous and cascading events on a RTU network.
The basic strategy is that the PDR 121 always listens to the radio channel. If it detects a
transmission from another radio, it will not start a transmission until the ongoing transmission is
finished. Though, it is still possible that two, or more, radios listens to the channel, consider it free
and start transmitting simultaneously. Configuring a random back-off delay time, called
Collision
Avoidance Delay,
solves this issue.
If the Collision Avoidance Delay function is activated, the radio will wait a random time after
receiving a serial message from connected device before transmitting a radio message. The radio
listens to the radio channel during the back-off time. This makes it possible to detect another
transmission initiated by another radio, which started the transmission after a shorter back-off time.
Collision is avoided. The radio that backed-off will re-initiate the random delay time when the
channel is free again.
The Collision Avoidance Delay is configured to a Min and Max value. See configuration in chapter
12.7.
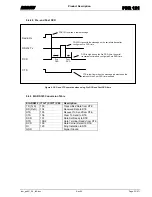
Collision Avoidance Min
is the time in seconds the radio always waits from when the radio
channel is free until it starts a transmission. Note that the Min time is not random. This value can be
set to zero.
Collision Avoidance Max
is the maximum limit for the random time.
The random time is calculated from the difference between
CA
Min and
CA
Max.







































































