





























Figure 61:
Illustration of the
smart exit
search area parameters.
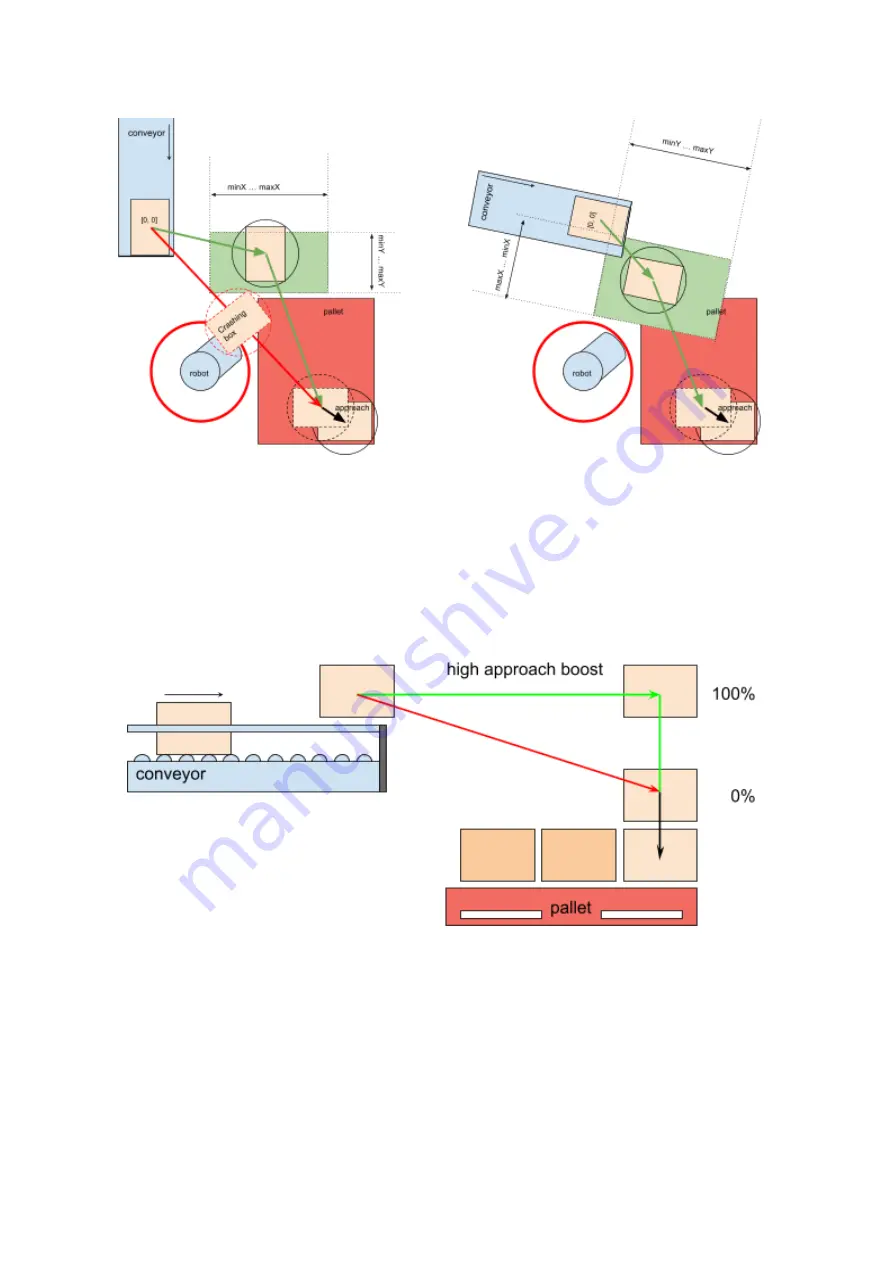
High approach boost
This value must be between 0% and 100%. It determines how high above the other boxes
the alternative path planning algorithm moves the box. Lower values let the box move closer
to the top of the other boxes on the pallet, higher values keep the box closer to the
box free
height (
figure 62
).
Figure 62:
Illustration of the
High approach boost
parameters.
Version 2.9.1
© Rocketfarm AS 2021. All rights reserved.
72







































































