





























OPERATION
NautoPilot 5000 Series
98
4002.DOC010102
Edition: September 2014
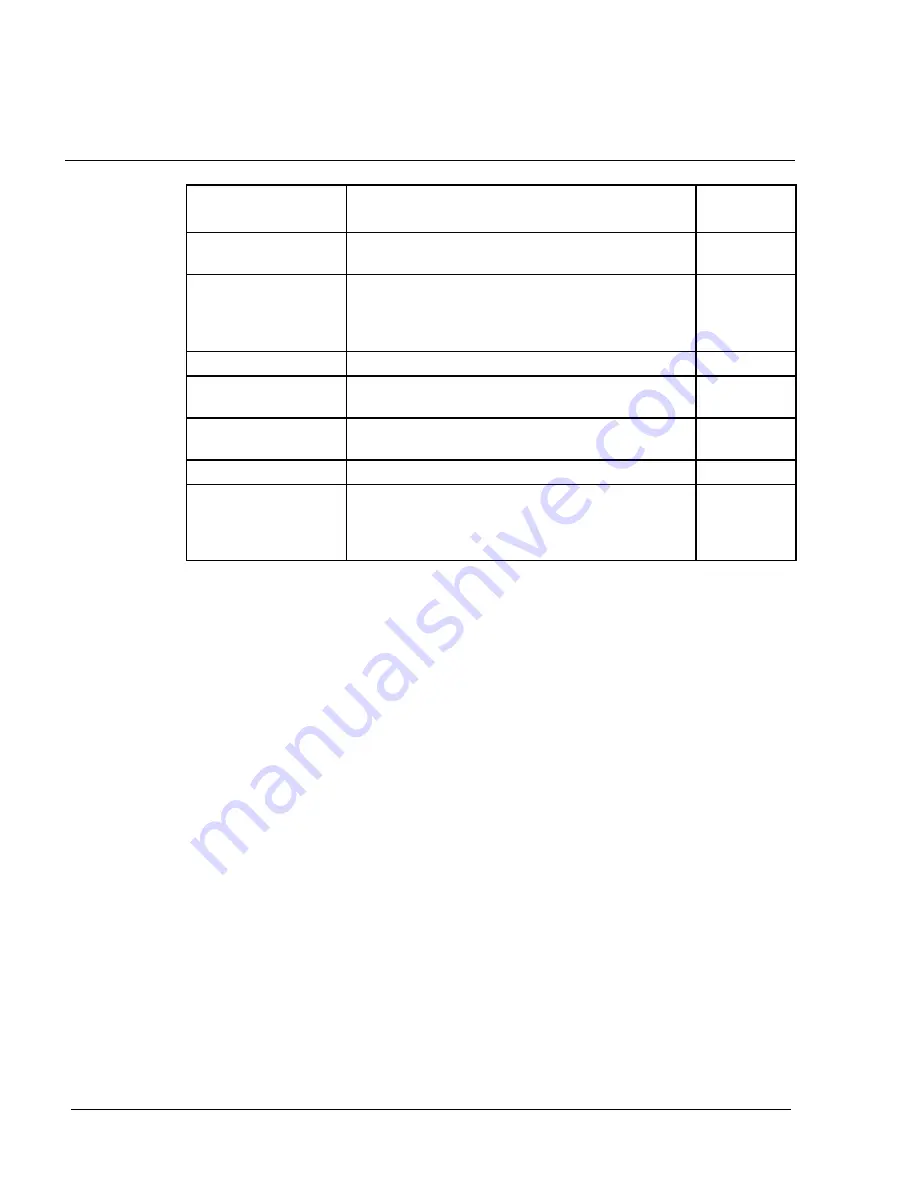
Parameter
Meaning
see section
Set [deg]
Direction of the drift for dead reckoning in Posi-
tion Monitoring.
2.3.5.5
Ship Load
Typical ship behaviour depending on the load
1.3.4,
2.3.5.1,
2.3.5.2,
2.3.6.5
Speed
Speed for acceleration limit
2.3.5.4
Track Limit Autopilot
Autopilot alarm activation if the adjusted track
limit is exceeded. (”Page” function)
2.3.6.4
Warning
Activation / deactivation of warning function for
the acceleration monitor.
2.3.5.4
Warning Threshold
Threshold in percent of acceleration limit
2.3.5.4
Yawing
Controller parameter that influences controller
performance.
1.3.1,
2.3.5.1,
2.3.5.2,
2.3.6.5







































































