





























OPERATION
NautoPilot 5000 Series
102
4002.DOC010102
Edition: September 2014
4.3.1
Precondition for switching from ”Standby” mode to ”Heading Control” mode
-- NautoPilot Operator Unit is switched on.
-- Selected NautoPilot Operator Unit is active (if there is more than one
NautoPilot Operator Unit) in a steering system.
-- Autopilot is in ”Standby” mode.
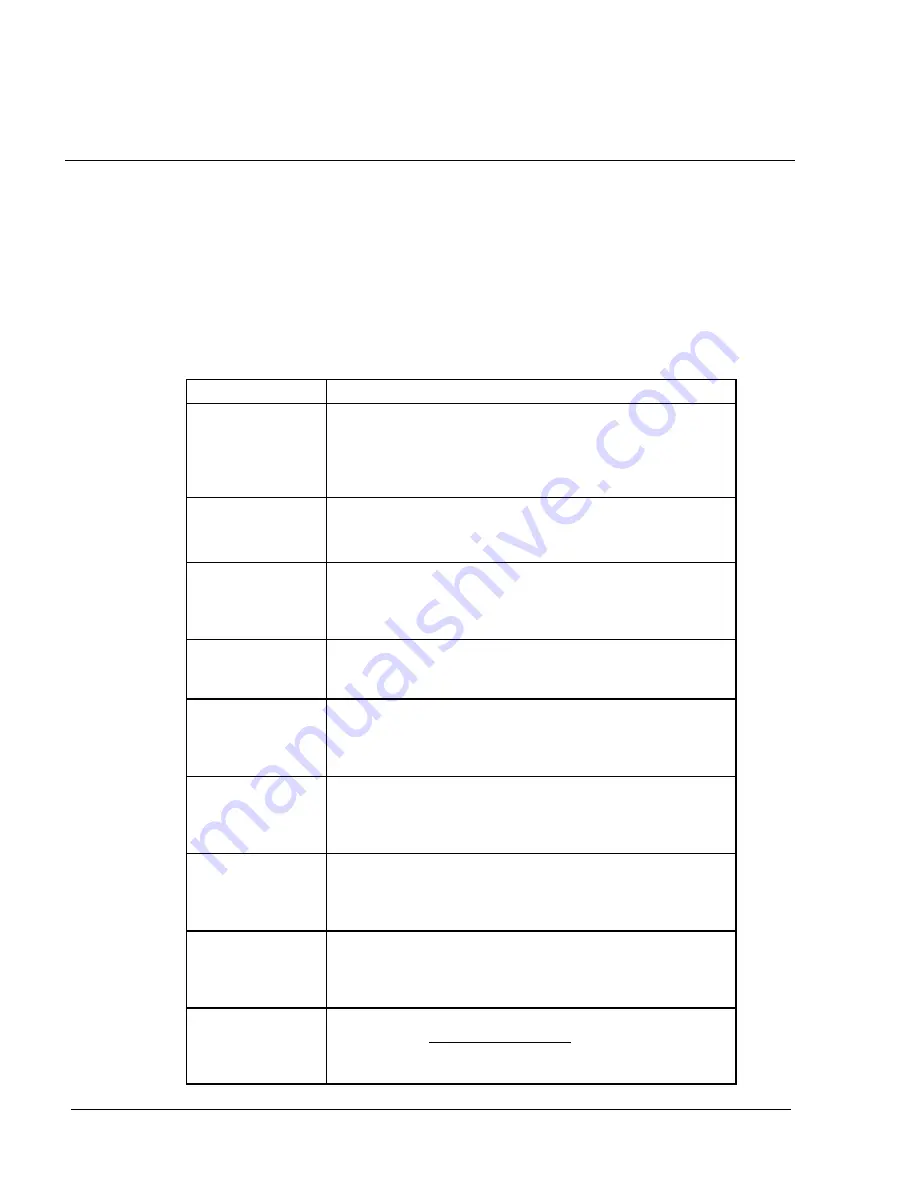
Table 18
Checks to be made before switching from “Standby” to “Heading Control”
Check
Comment
Heading source
The desired heading source is shown above the actual
heading value.
The heading source can be adjusted via the “Page” func-
tion: Softkeys “Page”
“Value”
“Heading”
(see also section 2.3.6.1 and Figure 44)
Heading value
The heading value must be valid.
-- Check actual heading, as this will be the
”set heading” after switching to ”Heading Control”.
Speed source
The desired speed source is shown and can be adjusted
via the “Page” function:
Softkeys “Page”
“Value”
“Speed”
(see also section 2.3.6.2 and Figure 50)
Speed value
The speed value must be valid.
If speed value is invalid, select “Manual Speed”.
(see also section 2.3.6.2 and Figure 50)
Rudder limit
Adjust rudder limit according to sea area and weather
conditions.
Softkeys “Limit”
“Limit Page”
(see also section 2.3.6.4)
RAD/RoT
Adjust RAD/RoT values to be less than the ship’s maxi-
mum values.
Softkey “Rad / RoT”
(see also sections 2.3 and 2.3.6.3)
OFF Heading
Adjust OFF Heading threshold according to traffic in sea
area; the more traffic, the smaller the threshold.
Softkeys “Limit”
“Limit Page”
(see also section 2.3.6.4)
Heading monitor
Adjust Heading Monitor threshold according to traffic in
sea area; the more traffic, the smaller the threshold.
Softkeys “Limit”
“Limit Page”
(see also section 2.3.6.4)
Alarm/Status
The alarm, warning and status bar (top bar of the display)
should not be red/yellowish orange in colour.
The cause of alerts should be resolved.
Alerts should be acknowledged.







































































