






















OPERATION
NautoPilot 5000 Series
158
4002.DOC010102
Edition: September 2014
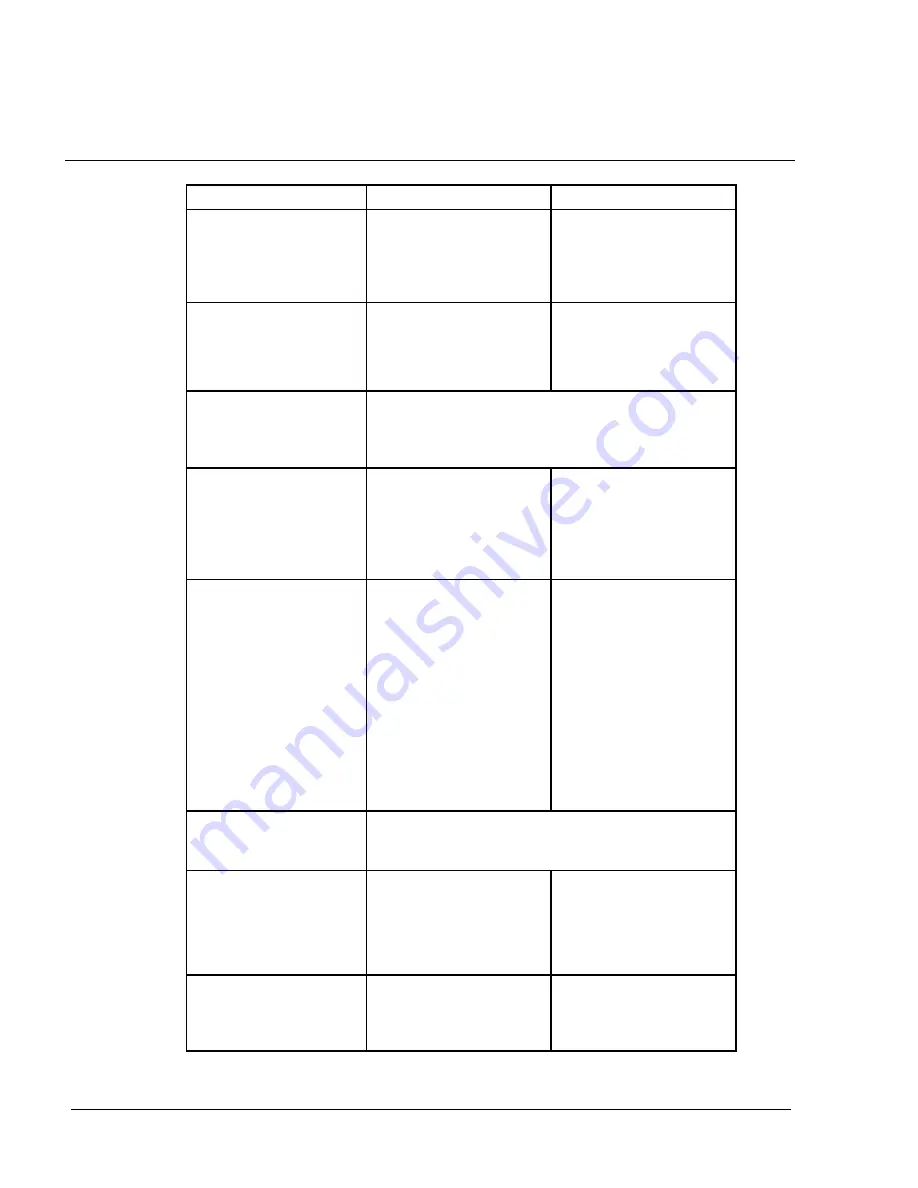
Message
Possible cause
Remedy
Ship‘s heading must be
within 60 degrees of ini-
tial route leg bearing
----------------------------------------------
Ship‘s heading m
Attempt to start Track
Control mode.
Angle between current
heading and track
course is more than 60
.
Reduce angle between
current heading and
track course, get closer
to the track.
Simulated sensor data
----------------------------------------------
Sim.Sens.data
The Autopilot is supplied
with simulated data.
Use real data.
Software successfully
copied: E00.00
----------------------------------------------
Software success
No corrective action necessary.
Refer to Installation Manual, section on “Software
Change”.
Software installation
skipped: version:xxx
----------------------------------------------
Software install
(Data/software already
existing).
Check software version
to be installed
(see section 2.3.5.6).
Also refer to Installation
Manual, section on “Soft-
ware Archive.”
Speed jumped
----------------------------------------------
Speed jumped
Difference between
speed values from se-
lected speed source is
grater than 5kn per sec-
ond
or
difference between
speed values during
sensor change is greater
than than 5 kn per sec-
ond.
Check speed sensor.
Speed Sensor changed
--------------------------------------
Speed Sens.Chng.
The selected Speed sensor was switched e.g. from
Log 1 to Ground 1. Check current Speed sensor for
more information.
Speed too slow
----------------------------------------------
Speed too slow
Attempt to switch to
Course Control mode
and the speed is below
the “Low Speed” limit.
Check the “Low Speed”
limit (refer to Service
manual)
or
increase ships‘s speed.
Switch to valid Position
Source
--------------------------------------
Switch to valid
Current Position sensor
failed.
Check Position Sensor
and select another Posi-
tion Sensor.







































































