




























OPERATION
NautoPilot 5000 Series
40
4002.DOC010102
Edition: September 2014
1.4.5.1.7.1
No Position
The Autopilot monitors the position interface. In the normal case, the position is trans-
mitted to the Autopilot once per second. Should the position fail to come in for longer
than approx.5 seconds, the following alert appears at the top bar of the display (see sec-
tion 6):
Indications
Comment/Notes
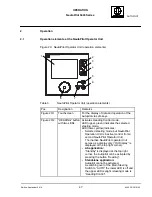
An alert is displayed at the top bar of the display (see section 6).
N o P o s i t i o n
Heading
Control
Track
Control
Track Control Interrupted
two pulses
Both messages swapping.
Two acoustical pulses.
The operating mode changes from Track
Control to Heading Control.
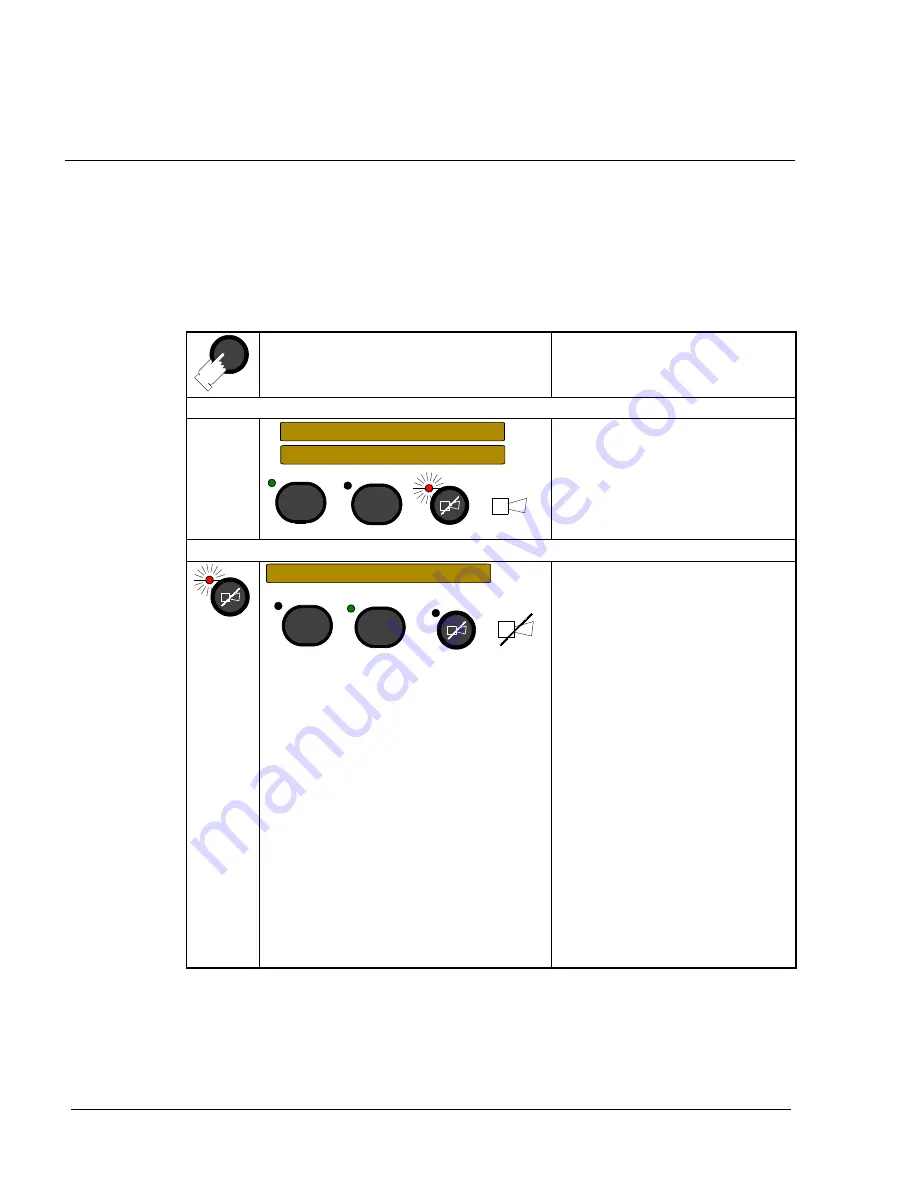
Acknowledge the alert.
Heading
Control
Track
Control
If the ship is at this moment on a track
section and not in a track change ma-
noeuvre, the heading is taken as the new
set heading. As opposed to manual
change--over from Track Control to
Heading Control, the setting of the ma-
noeuvre parameters might maintain as
under Track Control.
I. e.:
On straight leg:
-- All values will be adopted from
Heading Control mode.
On curved path:
-- The radius planned for the next
track change manoeuvre is
maintained.
-- The rudder limit remains at Max.
-- Alert “Check Settings” is displayed
(see section 1.4.5.1.7.2).
If during automatic change--over from
Track Control to Heading Control -- the
ship is in a track change manoeuvre, the
track course of the next track section is
taken as the new set heading. The ra-
dius planned for the current track change
manoeuvre is taken as manoeuvre pa-
rameter.
1.4.5.1.7.2
No or invalid Status from ECDIS
The Autopilot monitors the incoming status of the ECDIS. Should the status fail or be
provided with the information that the ECDIS is not ready for operation, the following
alert appears on the display:







































































