





























OPERATION
AUTOPILOT
NautoPilot 5000 Series
73
4002.DOC010102
Edition: September 2014
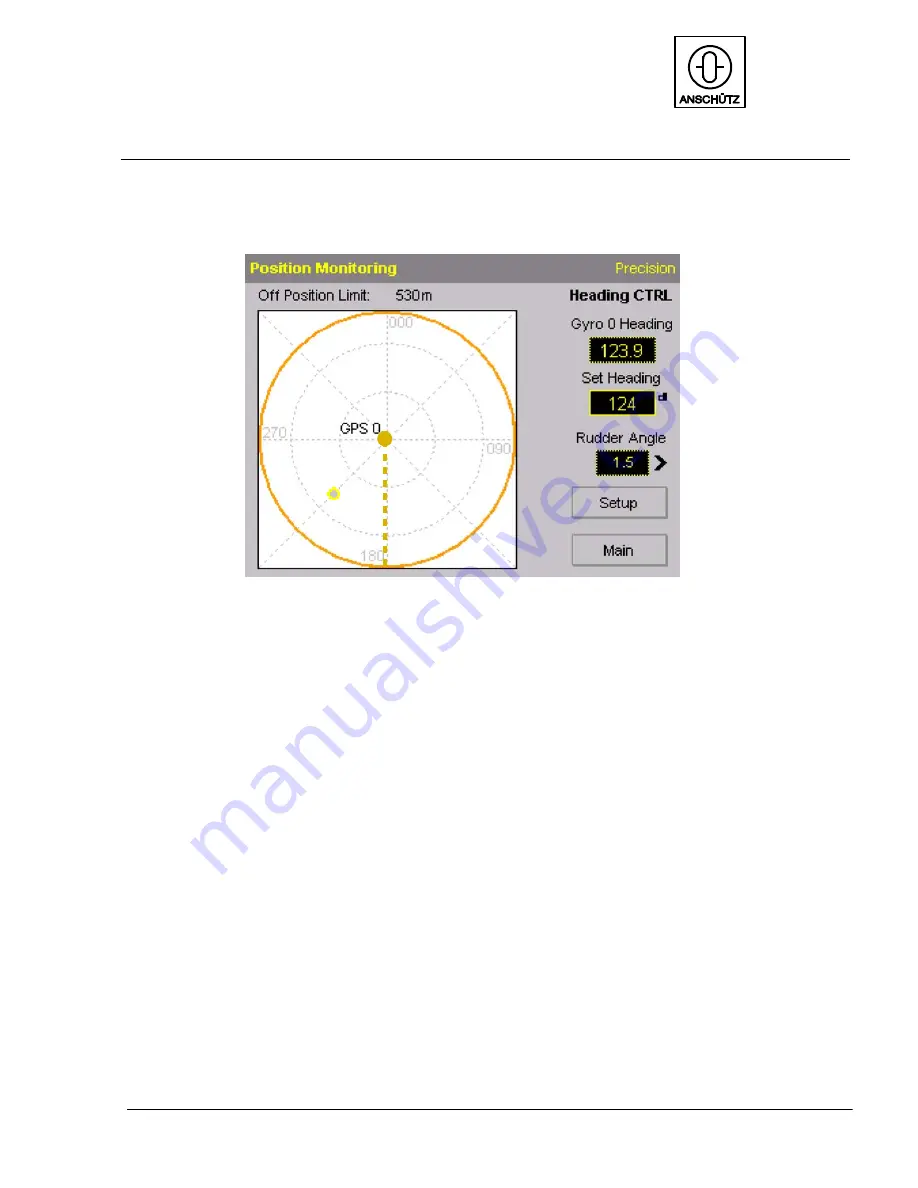
Figure 37: Display for the ”Position Monitoring” function
(limit exceeded and different drift)
DEAD RECK
As shown in Figure 37 there is a comparison between GPS0 and a dead reckoned posi-
tion:
-- The limit of 530m has been exceeded before (dotted line: drift line).
-- An alert was activated and acknowledged.
-- The last drift direction is displayed (dotted line: drift line). Drift changed.
-- The dead reckoning position jumps back onto the GPS0 position and adopts the
GPS0 value again.
-- The limit will be exceeded again, but in another direction due to different drift.
The new drift line will mark this direction.
The process will continue as described for Figure 36.
In order to stop the dead reckoning from drifting away, copy the calculated data to the
adjustable data (see Figure 39/9).







































































