





























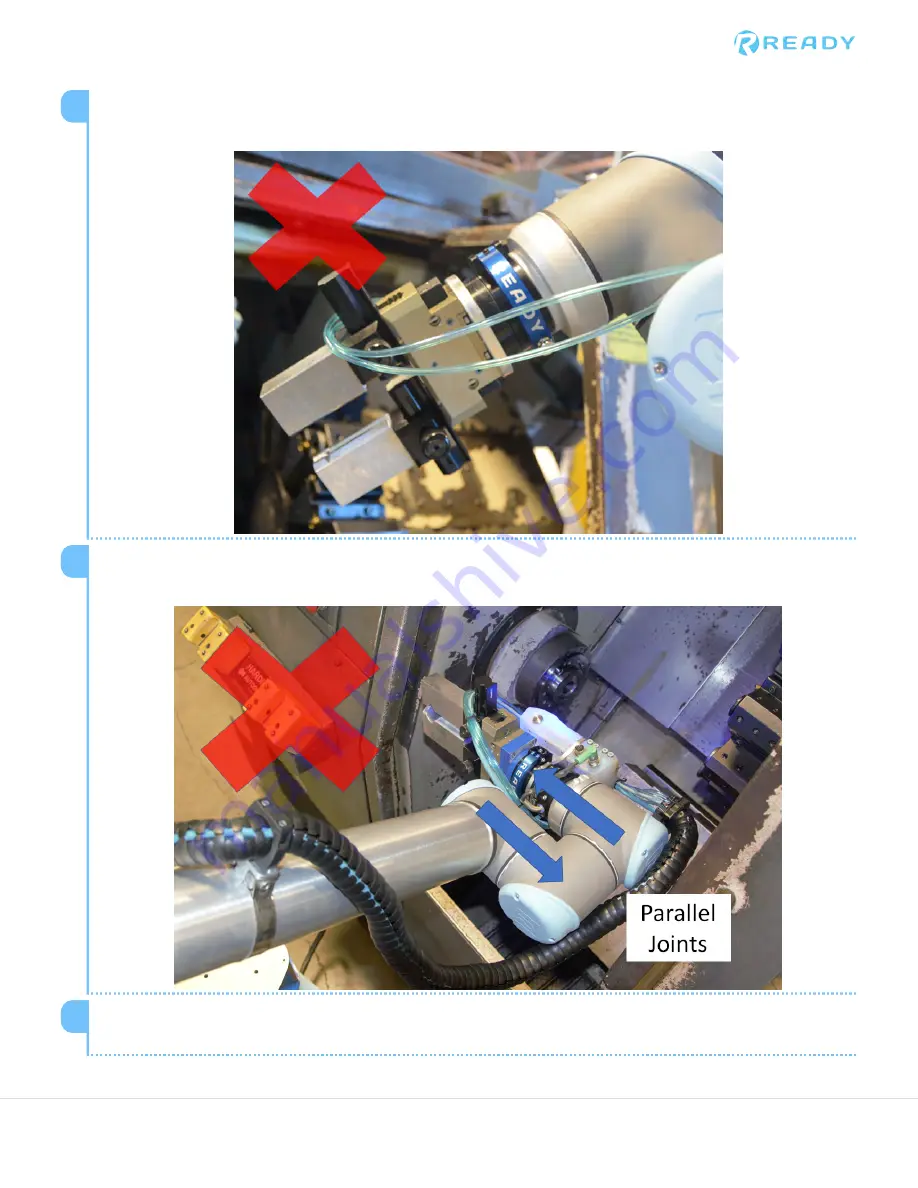
Clearing air hoses:
Avoid positions where air hoses could get in the way of the gripper or near anything
that they might get snagged on.
5
Avoiding robot warning states:
Avoid putting your robot into positions where its joints are in alignment.
This could trigger a warning state in Forge/OS. See the image below for an example.
6
Other relevant destinations:
Ensure that your robot arm can reach all other destinations that it needs to
go to (part presentations, feeders, etc.).
7
© 2020 COPYRIGHT READY Robotics ALL RIGHTS RESERVED





































































