














Jumping your robot
Note:
When moving the robot using the Cartesian panel, there's a chance that the robot will enter a
warning state caused by a joint alignment that the robot cannot programmatically move through (such
as when two joints line up with each other or when the robot arm is overextended). If you encounter
such an error, tap
FIX from
the notification bell and jog the robot out of the pose by using the Joints
panel in the RCP.
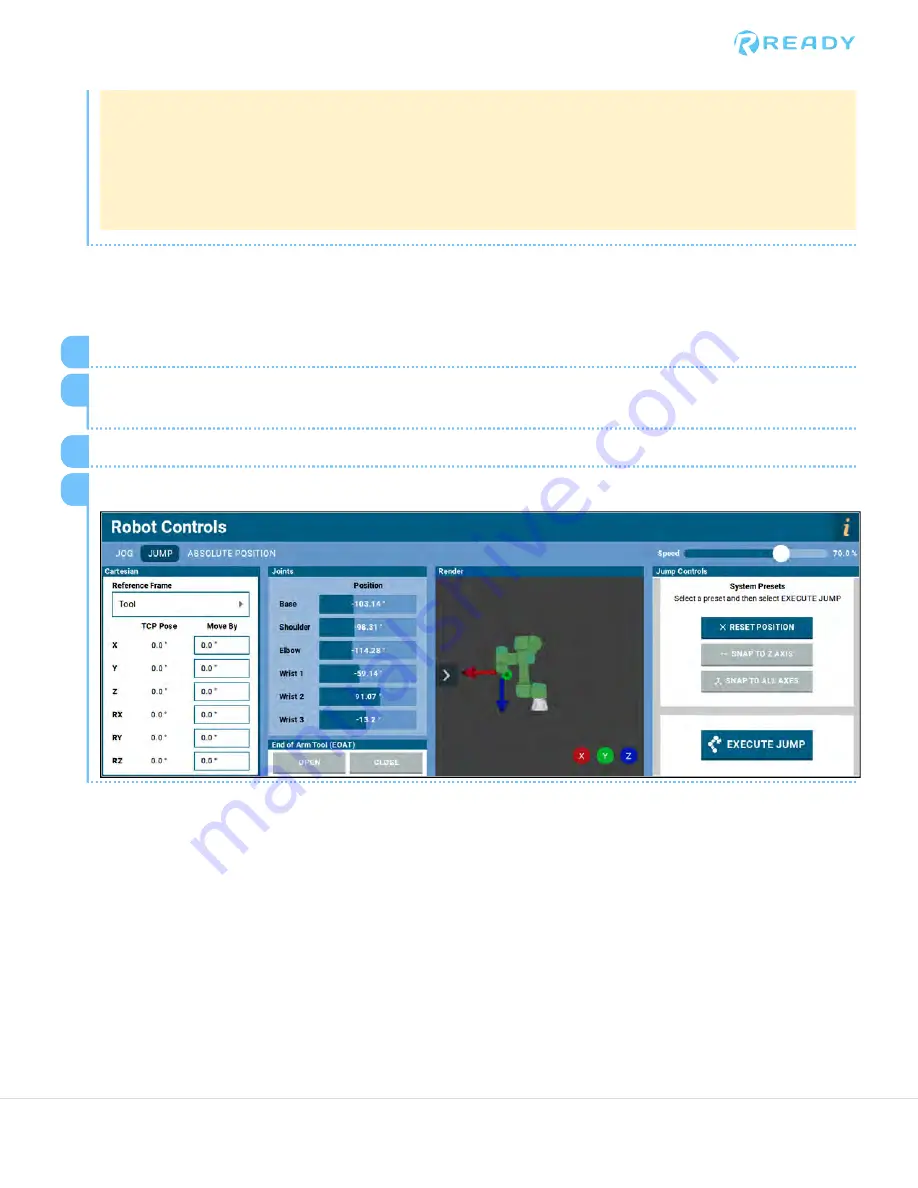
In the Jump section of the Robot Control Panel, tap
JUMP
to switch into Jump mode.
1
Ensure that the Cartesian controls are selected and choose the Reference Frame and direction that you
wish the robot to jump in.
2
Specify the distance in the column titled
Move By
.
3
Tap
EXECUTE JUMP
in the Jump Controls.
4
72
© 2020 COPYRIGHT READY Robotics ALL RIGHTS RESERVED







































































