





























生活美好,臂不可少
http://www.realman-robotics.com
23
port output current
0
1
mA
resolution
12
Bit
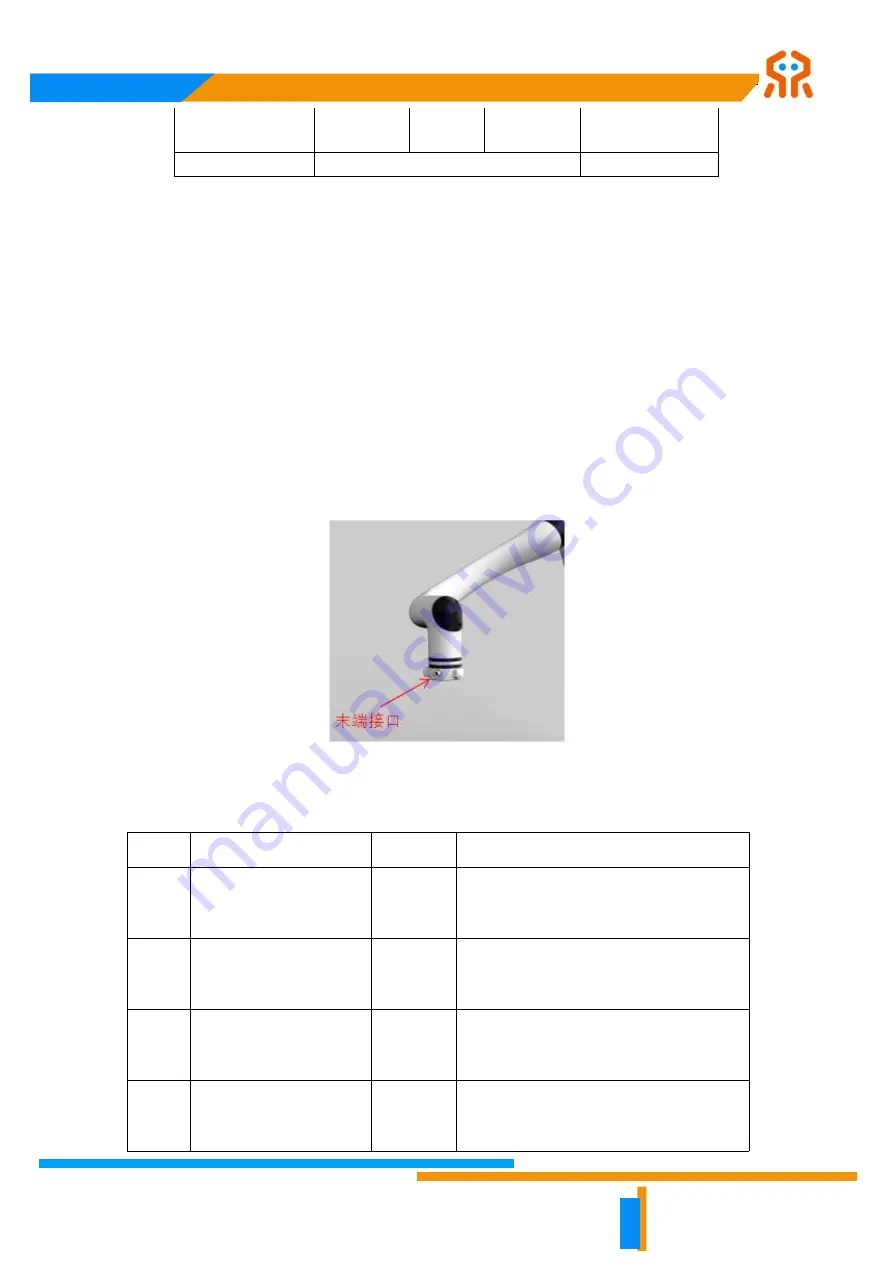
5.3 The Tool End Interface Board
To facilitate the users to add tools to the end of the robot, a 9-pin connector beside the
tool flange at the tool end of the cooperative robot arm can provide power and control
signals for the different grippers and sensors connected to the robot. Besides, there are
two buttons on the flange shell to control the robot by drag teaching and trajectory
reproduction, respectively.
Note: When plugging and unplugging the aviation plug cable of the end interface
board, please ensure that the end output power is off, otherwise there is a risk of
hardware damage.
Fig. 5-5 The arm-end tool interface.
The description of the interface board is shown as follows.
#
Interface Type
Quantity
Functionality
1
power output
1
configurable from 5V/12V/24V; switch on
and off is controllable
2
digital output
≤ 2
the reference level is consistent with the
power output; support 12V/24V
3
digital input
≤ 2
the reference level is consistent with the
power output; support 12V/24V
4
RS485
1
communicate with the peripherals via
RS485







































































