





























生活美好,臂不可少
http://www.realman-robotics.com
39
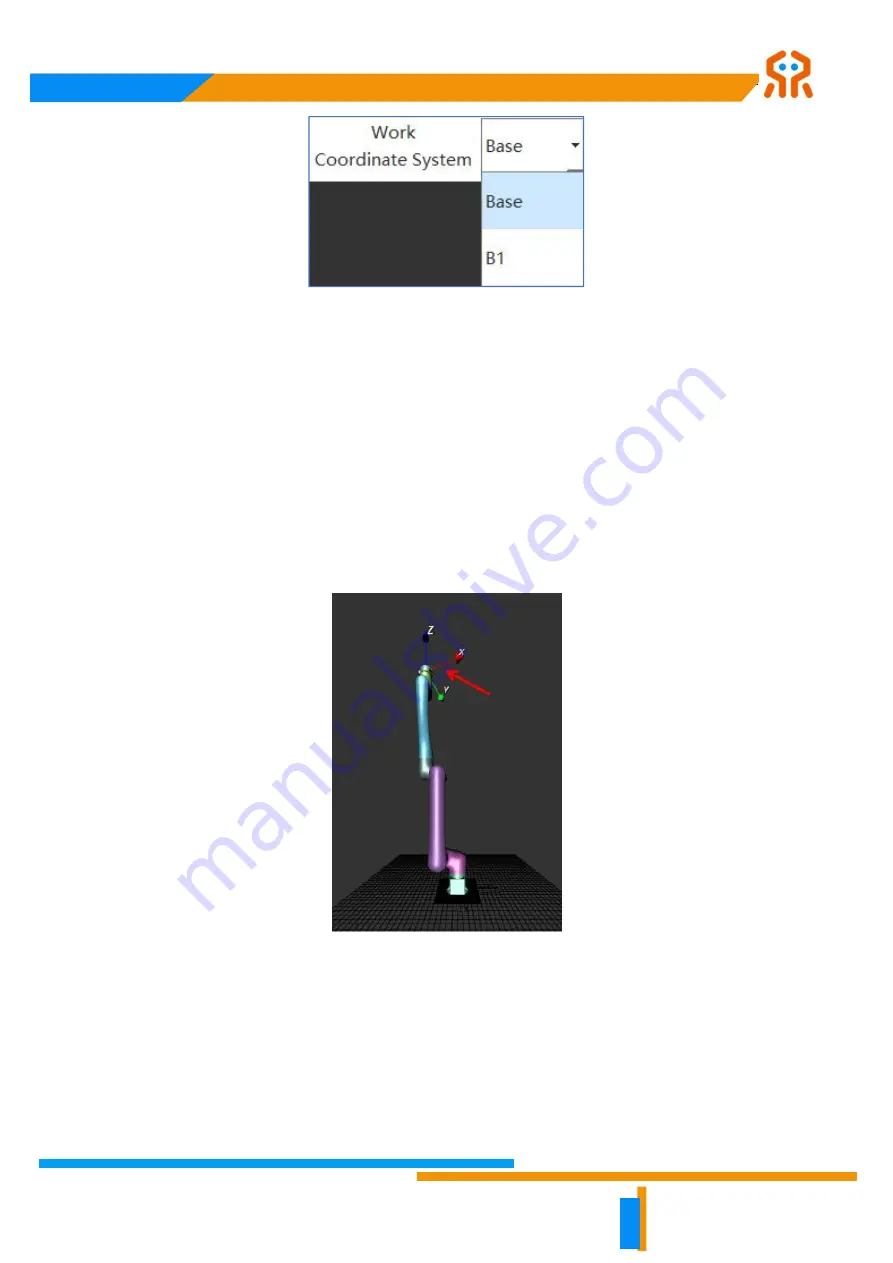
Fig. 8-16 Operation coordinate system selection demo.
8.2.11 Tool Coordinate System Selection
The tool end or tool coordinate system can be selected through the drop-down menu
and select the coordinate system of the flange center by default (see Fig. 8-17). Users
can also set customized tool coordinate systems. Assuming that tool1 is the tool
coordinate system set by the user (see Section 8.4.2.2 for the method of setting the
robot tool coordinate system), the tool coordinate system can be switched after the
setting is completed, as shown in Fig. 8-18.
Fig. 8-17 The coordinate system of the flange center at the robot end.



































































