





























生活美好,臂不可少
http://www.realman-robotics.com
40
Fig. 8-18 A tool coordinate system selection demo.
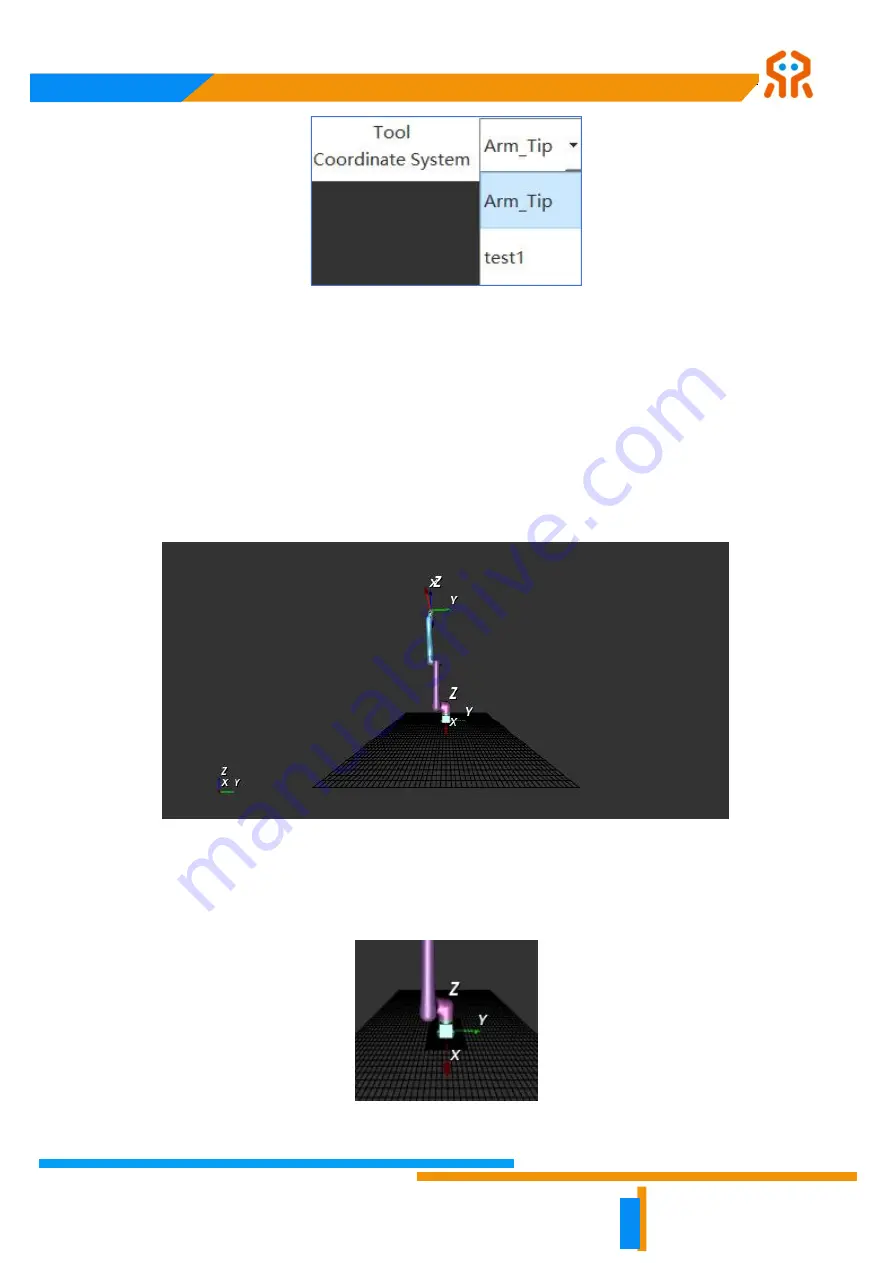
8.2.12 3D Simulation Model
The purpose of the robot simulation interface is to verify the program by the user
without the actual robot. Users can check whether the control program of the robot is
reasonable and correct by simulation. In the simulation model, users can change the
dimension and direction by dragging the mouse (or touching the tablet interface)
according to the needs.
Fig. 8-19 The 3D simulation model.
8.2.13 Move in Base Coordinate System
Select “Move in Base Coordinate System”, the robot will move in base coordinate
system.
Fig. 8-20 Move in base coordinate system.
































































