





























生活美好,臂不可少
http://www.realman-robotics.com
71
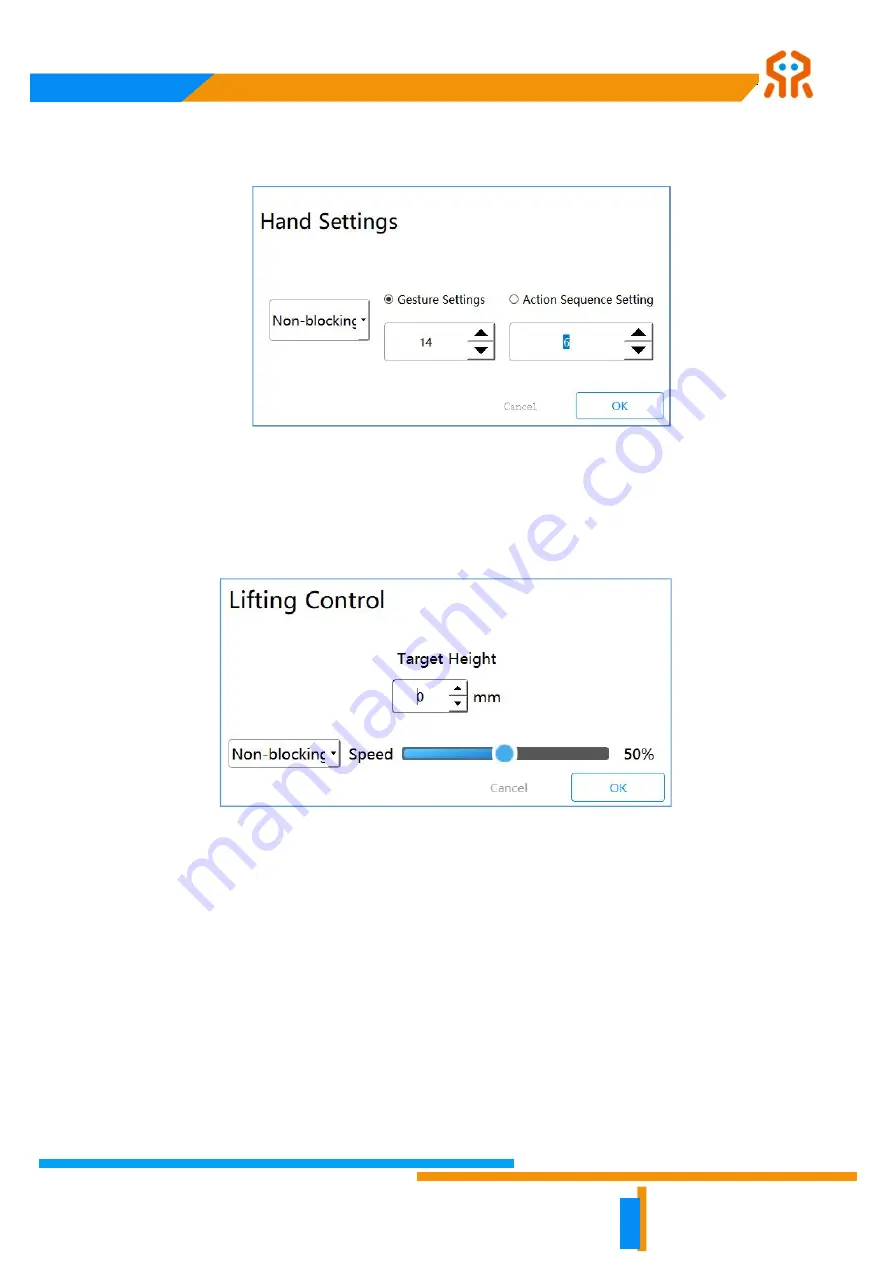
The line 27 is the Hand command with 14
th
gesture and action sequence number of 6,
shown below.
Fig. 8-82 Hand command setting example.
<Lift>
The Lift command is used to control the movement of a robot's extended joint lift or
slide. It can set target height, blocking mode, and speed.
Fig. 8-83 Lift command example.
Target height:
This controls the position of the lift. The position can be set according to
the actual working position of the robot but within the actual itinerary of the lift.
Blocking mode (setting)
:
It has blocking and non-blocking modes. In blocking mode,
after the lift movement is completed, the robot executes the subsequent instructions; in
the non-blocking mode, the robot synchronously executes the subsequent program
during the lift movement.
Speed
:
To set the speed of the lift in 0-100.
Demo
:
Add a Lift command between Waypoint7 and Waypoint8 shown as
follows.




































































