





























生活美好,臂不可少
http://www.realman-robotics.com
87
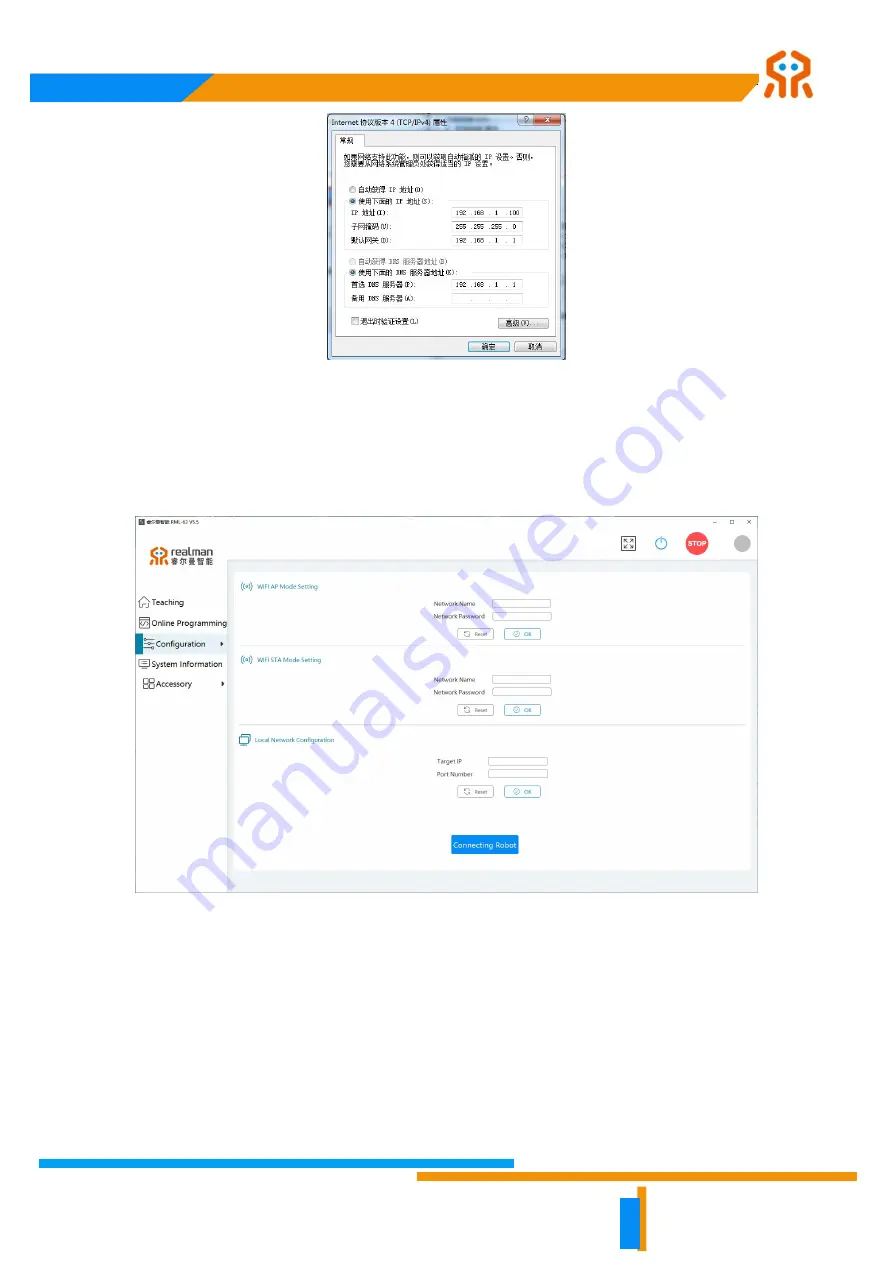
Fig. 8-107 The Internet IP address.
(6) Click the “Configuration -> Communication Configuration -> Connect Robot”
button in the teach pendant software, and the network connection between the teach
pendant software and the robot controller is established.
Fig. 8-108 Connect to the robot.
8.4.2 Robot Configuration
The robot configuration interface includes safety configuration, tool calibration,
working/operation coordinate system calibration, initial pose setting, installation
information, force sensor configuration, force sensor data map, version information,
and IO setting.







































































