





























生活美好,臂不可少
http://www.realman-robotics.com
93
Click the default value button, and the robot TCP parameter will be set to the default
value. End linear velocity: 0.1m/s, end acceleration: 0.5m/ s
2
, end angular velocity:
0.2rad/s, end angular acceleration: 1rad/ s
2
.
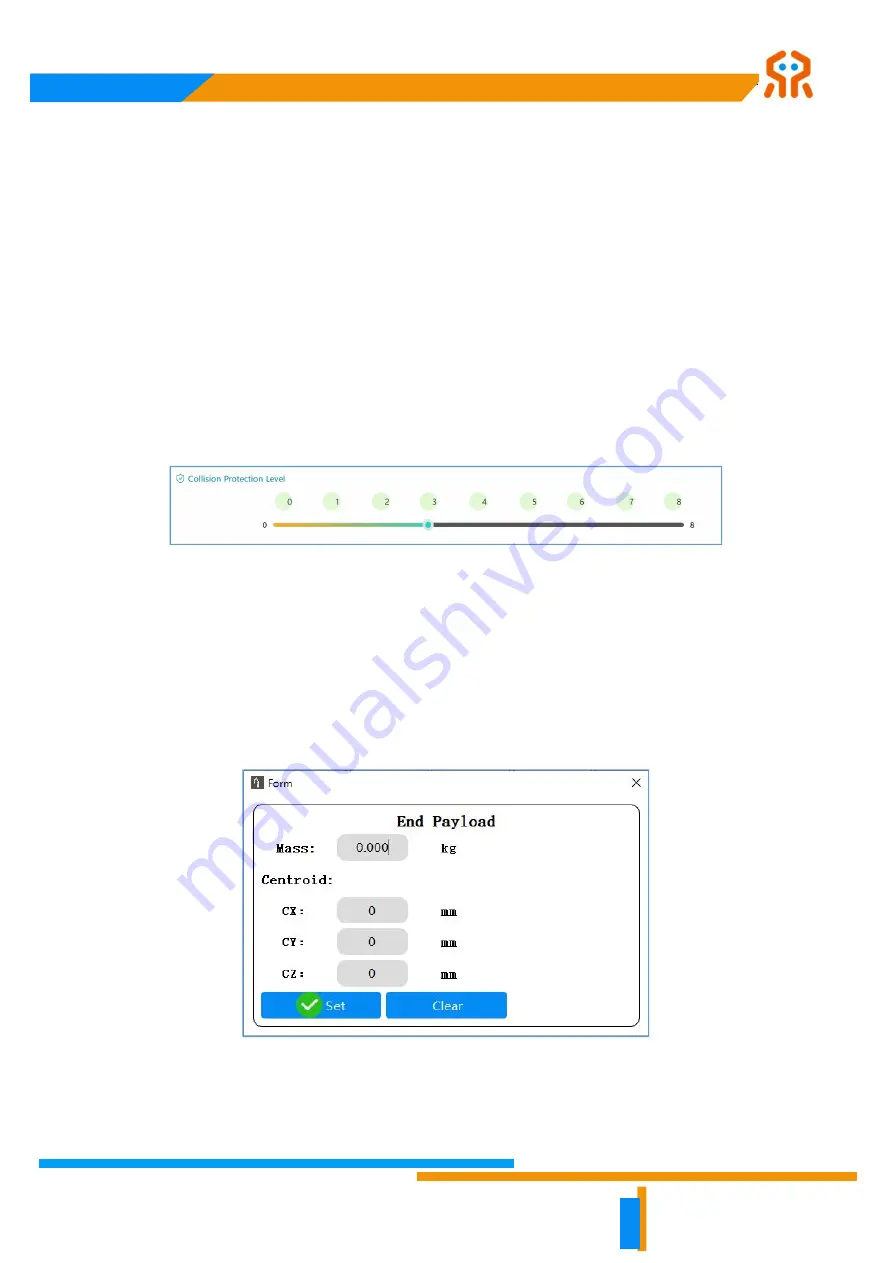
3. Collision Protection Rating
This part introduces the robot collision level setting. The level is 0-8, which
represents the level of the robot's collision sensitivity. The higher the level, the more
sensitive it is to the collision. The default collision level on the mechanical arm is 0,
that is, there is no collision detection.
Fig. 8-118 Collision protection rating/level setting.
Note: The user should make reasonable choice when setting the collision protection
level. The higher the level is, the higher the probability of the robot detecting a false
collision will be. If the robot end changes the tool and payload, the mass and centroid
parameters of the tool need to be set at "tool calibration" (refer to section 8.4.2.2 for
the tool calibration process).
Fig. 8-119 End payload parameter setting.
8.4.2.2 Calibration of the Tool-End Coordinate System
Tool-end or tool coordinate system calibration is shown in the figure below. Region 1



































































