





























生活美好,臂不可少
http://www.realman-robotics.com
28
Fig. 6-2 The schematic of the robot’s reachable space.
6.4 Robot Installation
When installing on the base, 4 M6 bolts are used to fix the robot body on the base.
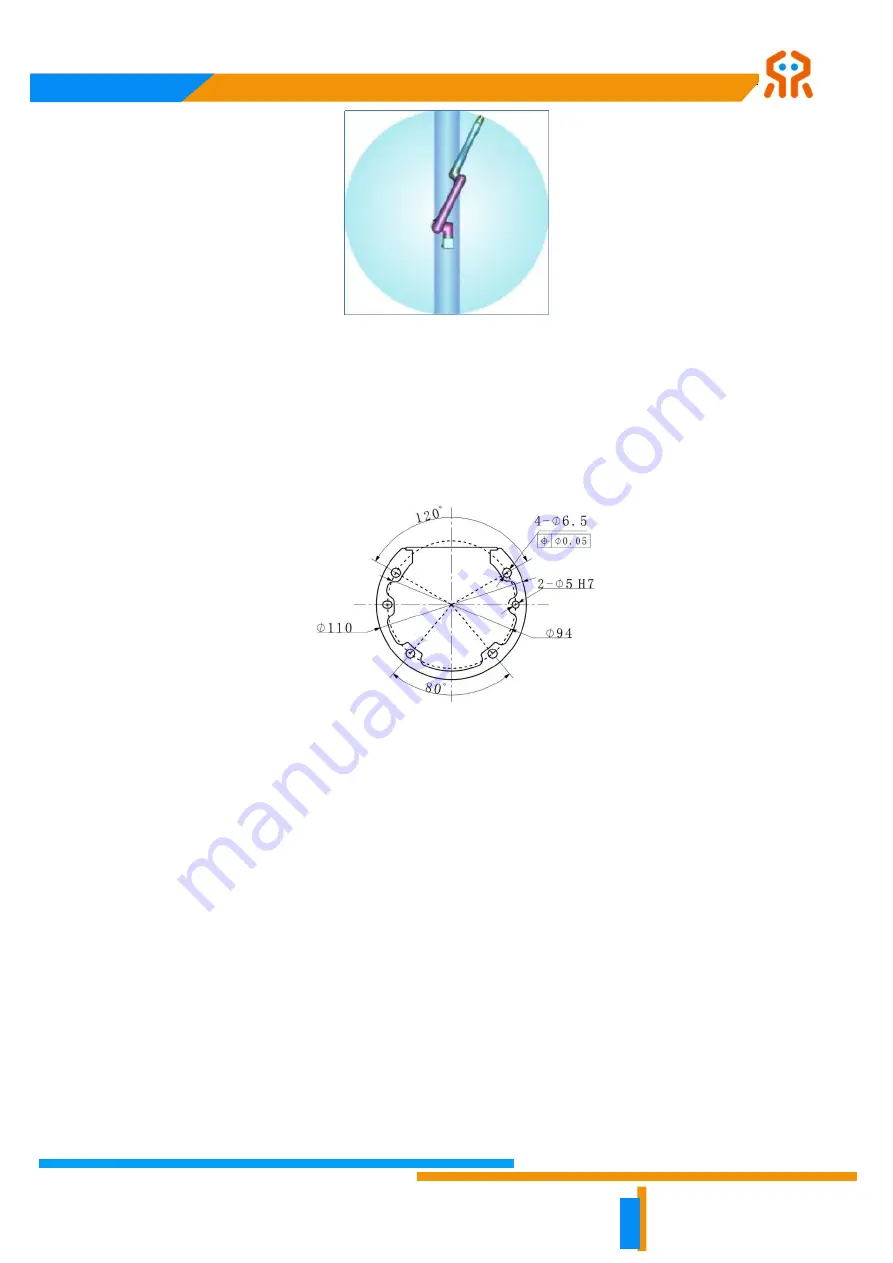
The mechanical dimensions are shown in Fig. 6-3.
Fig. 6-3 The dimensions of robot base.
1. When mounted on the base, the robot shall be in close contact with the base surface,
which shall be sufficient to withstand torsional forces of at least 3500Nm in the
rotation direction of rotation of the base joint and a weight of at least 100kg. The base
surface must not vibrate. If the robot is mounted on a moving platform, the
acceleration of the moving platform should be very low.
2. It is recommended that the user use base surface with large heat dissipation, such as
all-aluminum material. When the operating environment exceeds 35°C, it is strongly
recommended that the user use material with large heat dissipation.
Ensure that the robot arm is properly and safely installed in place.





































































