





























RealMan (Beijing) Intelligent Technology Co., Ltd.
39
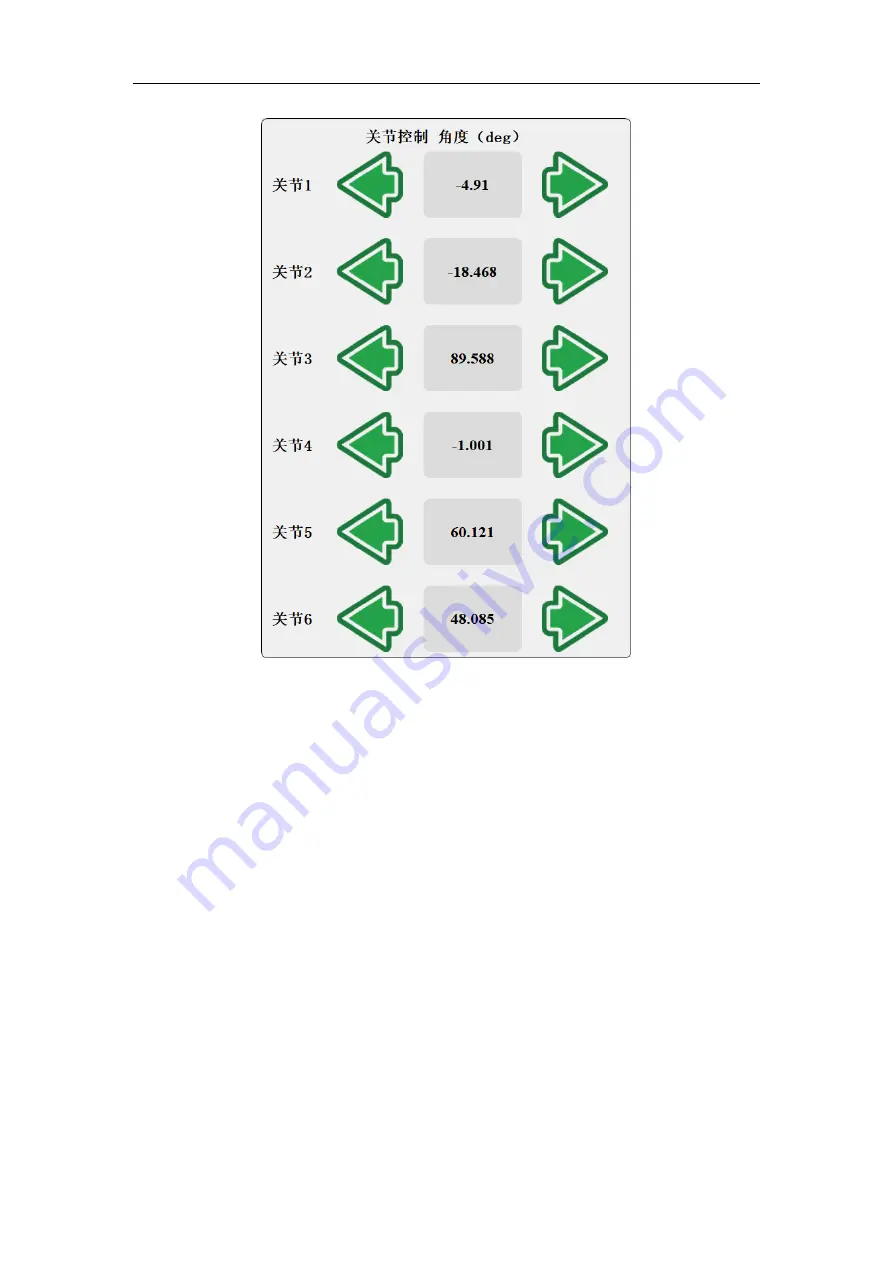
Fig. 8-13 The joint control panel.
8.2.8 Operation Mode Selection
When the actual robot arm is selected, the program runs on the actual robot. The robot
will move according to the selected operation. Its parameters and the moving status
image of the robot arm will be displayed on the interface.
When the simulation mode is selected, the robot does not move but its 3D simulation.
To finalize a robot program, the simulation mode can be selected first, and then the
program can be run simulatively to verify whether the program is feasible, improve the
safety of the robot application and determine whether the planning trajectory is
reachable.







































































