





























RealMan (Beijing) Intelligent Technology Co., Ltd.
68
4, which represents the level of the robot's collision sensitivity. The higher the level, the
more sensitive it is to the collision. The default collision level on the mechanical arm is
0, that is, there is no collision detection.
Note: The user should make reasonable choice when setting the collision protection
level. The higher the level is, the higher the probability of the mechanical arm to detect
a false collision will be. In addition, if the end of the robot changes the load, the dynamic
parameters of the robot must be recalibrated, otherwise the situation of false collision
will also occur.
4. Installation Method
There are three ways to install the robot arm, i.e., lifting, mounting and side mounting.
The internal algorithm of the robot arm is different, and the user needs to configure the
motion parameters according to the actual installation method.
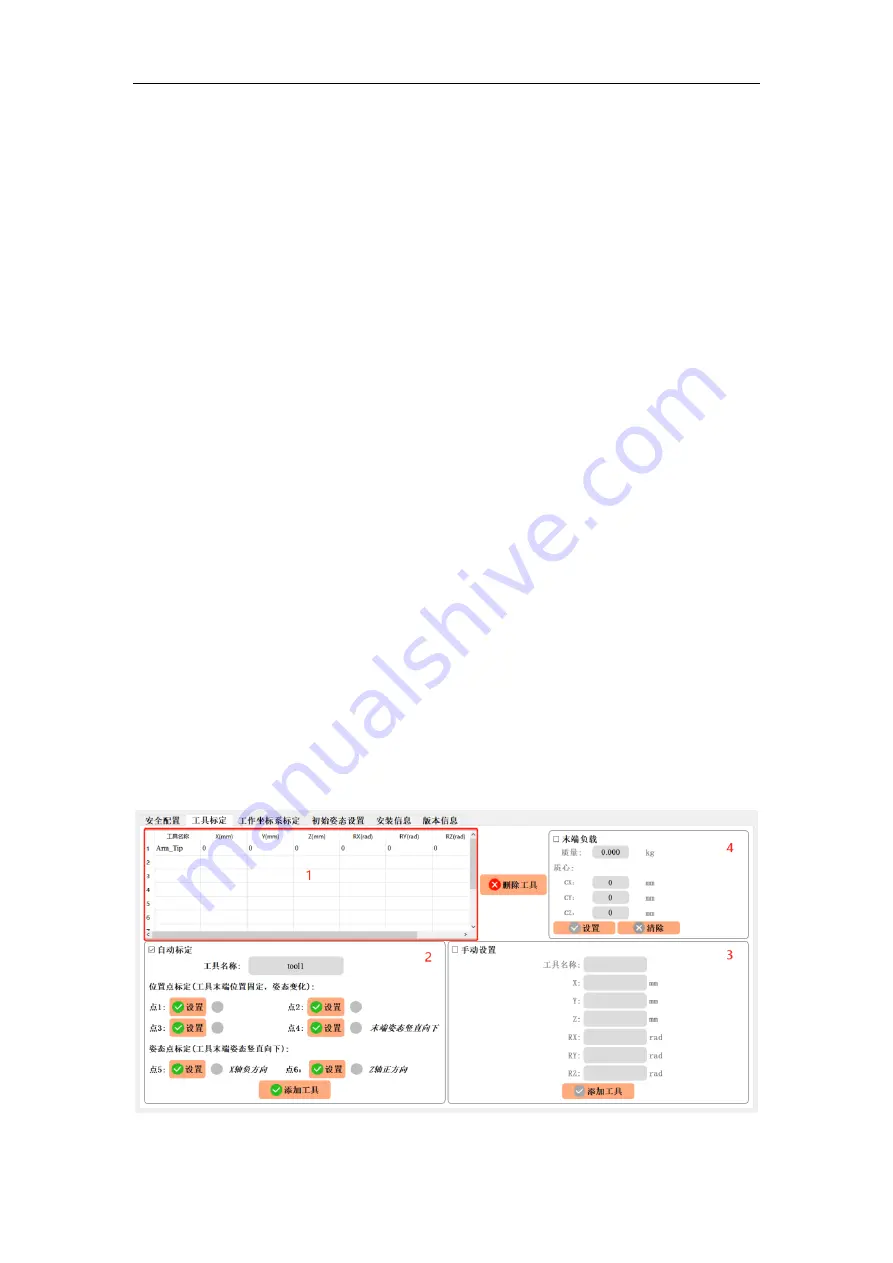
8.4.2.2 Calibration of the Tool-End Coordinate System
Tool-end or tool coordinate system calibration is shown in the figure below. Region 1
displays all current tool coordinate system and tool pose information. Region 2
automatically calibrates the current tool coordinate system. Region 3 manually sets the
tool coordinate system information.
Fig. 8-55 Calibration of the tool coordinate system.







































































