









©2016 ReconRobotics
13
Troubleshooting (cont.)
Troubleshooting (cont.)
When I drop the robot, it does not drive straight when it lands.
What could be wrong?
The robot
has electronic circuitry that needs to self-calibrate after deployment. When
the robot
lands, let it sit still for a few seconds before driving. It will automatically
recalibrate itself during this time and should resume driving as expected.
Why isn’t the robot’s IR light turning on?
The IR LED will not turn on if the light sensor detects sufficient light, in order to
conserve battery life. If your robot's IR light does not turn on when the robot is in a
state of complete darkness, there may be an issue with the light sensor.
What would cause the IR light to stay on constantly, even in
daylight?
If there is dust or debris present on the IR blister, the light sensor may determine the
environment has less ambient light than it really does. Ensure that the IR blister is free
of dust or debris by wiping it with a soft towel.
The robot or OCU II doesn’t seem to be holding a full battery
charge. What can be done?
If you feel that your Recon Scout XL robot or OCU II is not running for its complete
battery life on a full charge, there is a simple test you can run to check the
performance:
Fully charge your robot and OCU II (refer to page 7 for instructions). Start test
by pulling pin from robot and turning on the OCU II. Record the time that the
units are turned on. Run both units continuously until:
a. Robot stops sending video
b. OCU II screen goes blank
Record the time. Contact ReconRobotics for service if:
a. Robot runs for under 50 minutes
b. OCU II runs for under 120 minutes
©2016 ReconRobotics
2
Recon Scout XL Robot
Recon Scout XL Robot
Components
Components
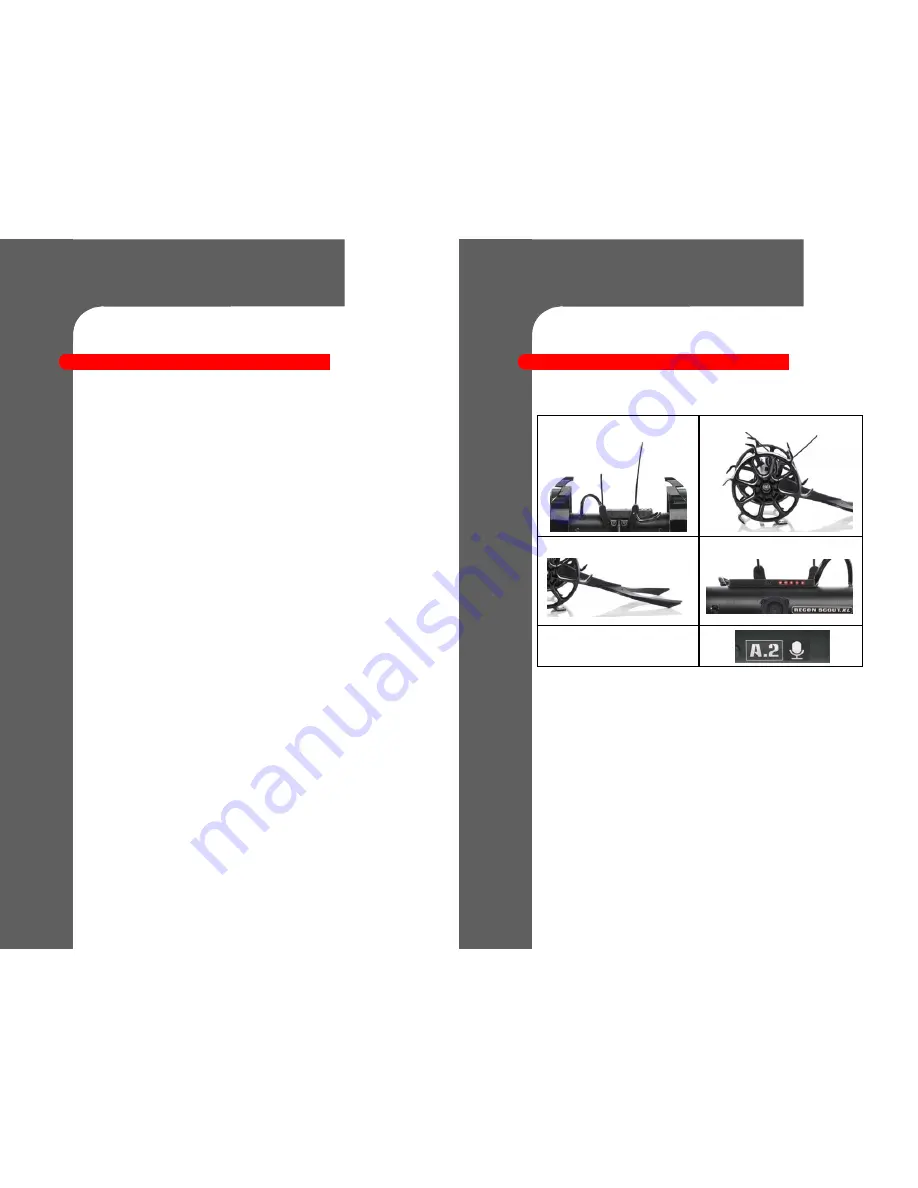
A robot should have the following components:
If any of these items are missing or damaged, please notify
ReconRobotics immediately.
(See Warranty and Repair, pg. 17)
Two Antennas
Two Wheels
Stabilizer Tail
IR Blister
Microphone:
(indicated by a sticker)







































































