





























61
Pitch function
The flight height of a racecopter is affected by the pitch
function. The control is effected with the left control stick
(see figure 14). To that effect, the control stick can be
moved forward and backward. Unlike the other control
functions, the stick does not keep springing back to the
centre position.
Depending on the control stick position, the speeds of
the four propellers change. If the control lever has been
pulled all the way to the body, the motors are switched
off.
If you push the control stick from the bottom position
forward, the propellers start up and increase the speed
according to the position of the stick.
Once the control stick is in the centre position, the pro-
peller speeds should be high enough for the racecopter
to hover. If the control stick is pushed forward further, the
racecopter will rise. If the control stick is pulled back, the
racecopter drops.
Yaw Function
The two right-ward turning and the two left-ward turning
propellers balance out the torques acting on the model.
The racecopter hovers stably.
If the control lever for the yaw function (see figure 15)
is moved to the left, the electronics in the model will in-
crease the speed of the propellers turning to the right
(clockwise) and at the same time reduce the speed of
the propellers turning to the left (counter-clockwise).
This way, the entire lift force remains the same, but only
one torque acts on the model, which turns the racecop-
ter around its vertical axis to the left.
If the control stick is moved to the right, the speed
changes of the propellers are precisely the other way
around and the model turns to the right.
The racecopter can thus turn around its axis in place.
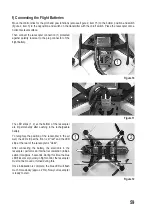
Figure 14
Figure 15




































































