




15
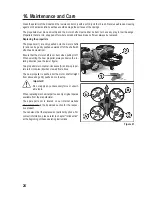
e) Basic Information Relevant for Controlling of Quadrocopters
Before you fly your model, you should first familiarise yourself with the control possibilities open to you and thereby
be able to fly safely.
The symmetrical setup of the model makes it very difficult to assign the alignment (front/rear). This is why there is
a blue LED between the two front propellers and a red LED between the two rear ones. Both LEDs are lit in flight.
The quadrocopter is controlled via the two control levers at the remote control transmitter. The following functions
are available:
Pitch Function
With the pitch function you can control the flight altitude of the quadrocopter (see figure 8). The left control lever (also
see figure 1, item 9) is used for control. To that effect, the control lever can be moved forward and backward. Unlike
the other control functions, the lever does not keep springing back to the centre position.
Depending on the control lever position, the speeds of the four propellers change. If the control lever has been pulled
all the way to the body, the motors are switched off.
If you push the control lever from the bottom position forward, the propellers start up and increase the speed according
to the position of the lever. Once the control lever is in the centre position, the propeller speeds should be high enough
for the quadrocopter to hover. If the control lever is pushed forward further, the quadrocopter will rise. If the control
lever is pulled back, the quadrocopter drops.
Figure 8