





























148
18. Vliegen in koploze modus
De bewegingsrichting van de quadrocopter is altijd afhankelijk van de richting waarin het model door de piloot is
gericht of van welke zijde de piloot tegen de quadrocopter aankijkt. Men kan ook heel gemakkelijk verkeerd sturen als
men het model niet van achteren, maar van de zijkant of van voren ziet. Om deze reden is de quadrocopter voorzien
van de koploze modus.
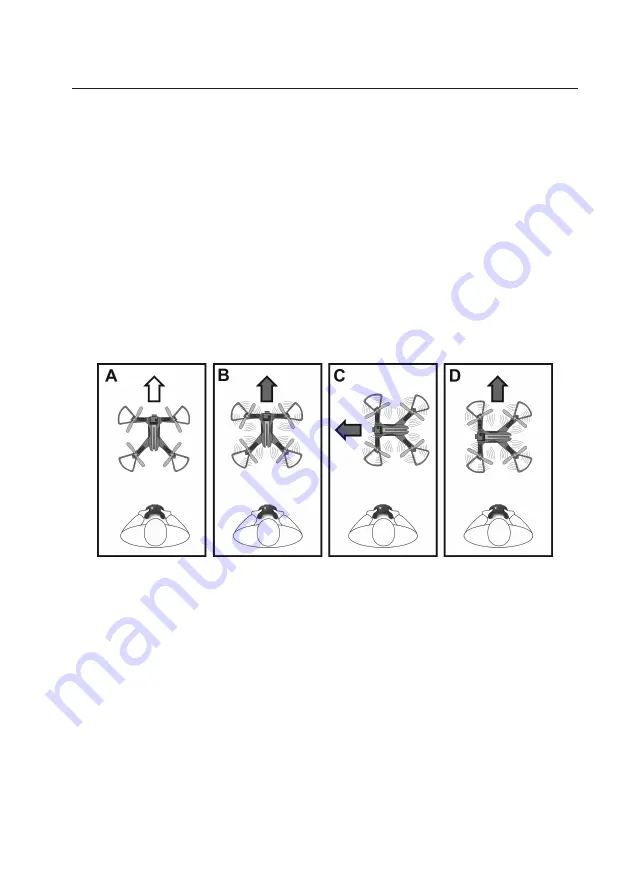
Om de koploze-modus effectief te kunnen gebruiken, is het echter noodzakelijk dat de quadrocopter met de twee
voorste propellers of met de camera in de gewenste voorwaartse richting wordt uitgelijnd voordat de pitch-stuurknup-
pel heen en weer wordt bewogen (zie de witte pijl in afbeelding 17, illustratie. A).
Zolang de piloot van het model dan precies achter de quadrocopter staat en in de vooraf vastgelegde richting kijkt,
reageert de quadrocopter zoals deze op de zender wordt bestuurd. Als naar voren wordt gestuurd, vliegt de quadro-
copter vanuit het standpunt van de piloot ook naar voren (zie afbeelding 17, illustratie B).
Als de quadrocopter in de vlucht bijv. 90° naar links is gedraaid en nu met de linkerzijde naar de piloot is gericht,
vliegt deze uit het standpunt van de piloot naar links, als op zender naar voren wordt gestuurd (zie afbeelding 17,
illustratie C).
Bij activering van de koploze-modus speelt het geen rol, in welke richting de voorzijde van de quadrocopter is gericht.
Als op de zender naar voren wordt gestuurd, vliegt de quadrocopter altijd in de richting die bij het inschakelen als naar
voren werd vastgelegd (zie afbeelding 17, illustratie D).
Normale modus
Normale modus
Koploze modus
Afbeelding 17
Summary of Contents for 1719347
Page 37: ...37 Bild 28 ...
Page 77: ...77 Figure 28 ...
Page 118: ...118 Figure 28 ...
Page 158: ...158 Afbeelding 28 ...




























































