





























88
b) Reconnaissance des canaux de l’émetteur (généralités)
Avant de commencer la procédure d’apprentissage,
déconnectez la batterie éventuellement branchée
du Quadrocopter. Débranchez également le câble
de raccordement qui relie éventuellement le PC et
le Quadrocopter.
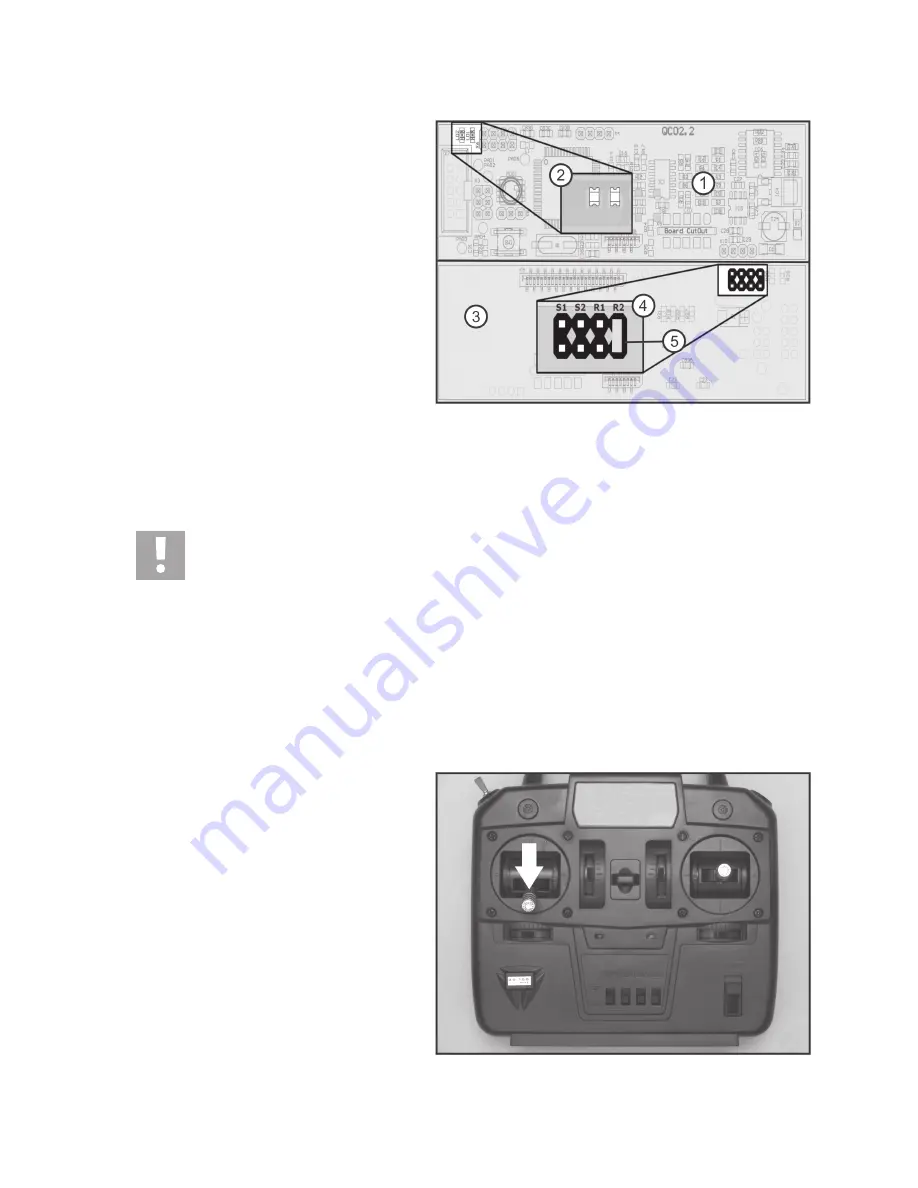
Placez un cavalier (en anglais « jumper ») (cf.
image 1, repère 8) pour le réglage de configura-
tion « R2 » pour « Remote Setting » (5). Vous trou-
verez les barres de connexion pour les cavaliers /
jumpers dans le coin supérieur droit à l’arrière de
la carte de commande (platine de commande au
milieu) du Quadrocopter.
Les deux LED (2) pour l’affichage de certains états
de fonctionnement se trouvent sur l’un des côtés
de la platine (1). En revanche sur l’autre côté de la
platine (3) se trouvent les barres de connexion « S1,
S2, R1, R2 » (4) pour les cavaliers / jumpers.
Pour mettre le Quadrocopter en mode de configuration « Remote Setting », placez le cavalier « R2 » (5) comme
indiqué sur l’image 10. Cette configuration est indépendante de la façon dont sont positionnés les autres cavaliers /
jumpers.
Important !
Avant d’allumer l’émetteur, positionnez le levier des gaz sur « Moteurs à l’arrêt » et veillez à ce que tous
les leviers de trim / boutons de réglage de trim des leviers de commande sont en position centrale. Il se
peut autrement que le Quadrocopter ne reconnaisse pas l’émetteur après la connexion de la batterie
de propulsion.
Allumez à présent l’émetteur et déployez complètement l’antenne télescopique de l’émetteur. Vérifiez que tous les
leviers et trims de l’émetteur sont en position neutre. Les exemples représentés montrent la procédure d’apprentis-
sage à l’aide d’une télécommande en mode 2. Si vous préférez un autre mode, les axes utilisés peuvent diverger (cf.
chapitre « Modes de pilotage possible ») !
Assurez-vous que les boutons de réglage pour les trims de la télécommande sont en position neutre ! Sinon la
reconnaissance des canaux ne sera pas possible !
Faites également attention à la direction dans la-
quelle vous déplacez les leviers, sinon les signaux
risquent d’être intervertis ! Utilisez toujours les
radiocommandes sur ordinateur sans mélangeur !
Déplacez le levier des gaz (cf. image 11) vers l’ar-
rière en position zéro (moteur à l’arrêt), tous les
autres éléments de commande doivent être en
position neutre.
Si vous souhaitez faire voler le Quadrocopter en
« Pitch Reverse » (« moteur à l’arrête », levier de
commande pour les gaz vers l’extérieur en par-
tant du corps), amenez le levier des gaz en posi-
tion maximale vers l’avant avant de connecter la
batterie.
Figure 10
Figure 11
Summary of Contents for 208000
Page 23: ...23 i Mögliche Fernsteuermodi Mode Gas Gier Nick Roll 1 2 3 4 ...
Page 58: ...58 i Possible flight modes Mode Gas Yaw Pitch Roll 1 2 3 4 ...
Page 93: ...93 i Modes de pilotage possibles Mode Gaz Lacet Tangage Roulis 1 2 3 4 ...
Page 128: ...128 i Mogelijke modi voor de afstandsbediening Mode Gas Gier Nick Roll 1 2 3 4 ...
Page 142: ...142 ...
Page 143: ...143 ...
































































