
























98
d) Instellen van de servo-saver
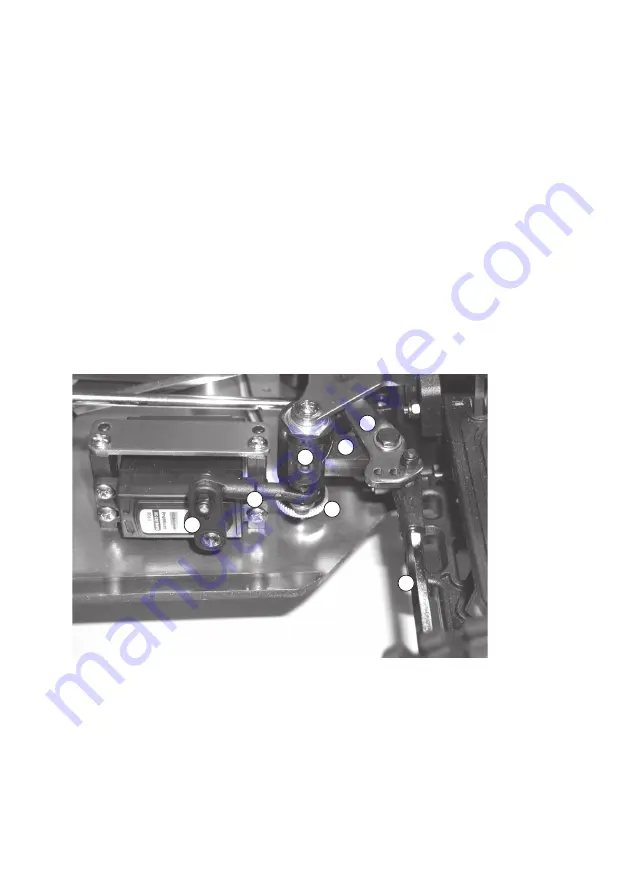
De besturing van het voertuig is uitgevoerd als fuseebesturing.
De draaibeweging van de servostuurhendel (A) werkt via de stuurstang (B) op een arm (C) van de servosaver.
De servosaver bestaat uit twee rechthoekig t.o.v. van elkaar geplaatste armen (C en D) die niet star met elkaar
verbonden zijn, maar die d.m.v. een veer op hetzelfde vlak met de stuurstangen tegen elkaar in kunnen bewegen.
De tweede arm van de servosaver (D) beweegt de besturingsplaat (E) die opnieuw via de beide spoorstangarmen (F)
de stuurinslag van de voorwielen bewerkt.
Als er tijdens het rijden harde schokken via de wielen naar de stuurmechaniek overgebracht worden, worden deze
niet onmiddellijk naar de stuurservo overgedragen maar via de verende verbinding van de beide hefarmen (C en D)
van de servosaver gedempt.
Het effect van de servosaver kan met een kartelmoer (G) ingesteld worden door de aandrukkracht van de veren op de
beide hefarmen te veranderen.
Bij een te zachte instelling bewerken lichte stoten tegen het wiel reeds een verdraaiing van beide armen van de
servosaver, wat de stuurprecisie en wegligging bij het rijden negatief beïnvloed.
Een te harde instelling daarentegen kan ertoe leiden dat de servoaandrijving wordt beschadigd, aangezien stoten
tegen de wielen ongefilterd naar de servo worden doorgestuurd.
A
C
B
E
D
F
G
Summary of Contents for 237852
Page 106: ...106 ...
Page 107: ...107 ...







































































