



























104
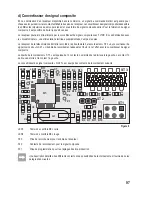
b) Reconnaissance des canaux de l’émetteur (généralités)
Avant de débuter la procédure d’apprentissage, débranchez, le cas échéant, la batterie raccordée à votre Quadro-
Copter. Débranchez également tous les câbles de raccordement entre l’ordinateur et le QuadroCopter.
Les interrupteurs DIP 1 à 6 (voir également figure 17) permettent de définir les modes disponibles. Commutez
l’interrupteur correspondant en position « ON ».
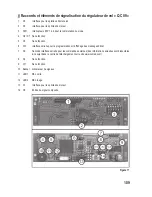
Les interrupteurs peuvent être affectés de la manière suivante :
1 Paramètres « Mode Sport »
2 Paramètres « Mode User »
3 Mode Bootloader
4 Mode de configuration RC
5 Sans fonction
6 Sans fonction
Afin de réaliser la procédure d’apprentissage de la télécommande, basculez l’interrupteur 4 en position « ON ».
Indépendamment du mode de la télécommande (modes 1 à 4, voir également chapitre « Modes de
télécommande disponibles ») pour lequel vous souhaitez effectuer la procédure d’apprentissage, vous
devez observer l’ordre suivant pour l’affectation des canaux et alors tenir compte des signaux de la DEL
rouge « LED2 ».
Durant la procédure d’apprentissage, veuillez impérativement uniquement actionner les leviers indiqués,
le réglage ne serait sinon pas reconnu !
Allumez maintenant votre émetteur. Assurez-vous que tous les leviers et compensateurs de l’émetteur soient en
position neutre. Les exemples illustrés décrivent la procédure à l’aide d’une télécommande en mode 2. Si vous préférez
un autre mode, les axes employés peuvent diverger (voir chapitre « Modes de télécommande disponibles ») !
Assurez-vous également que les curseurs de réglage pour le compensateur se trouvent en position neutre sur la
télécommande ! Une reconnaissance correcte des canaux n’est sinon pas possible ! Assurez-vous également que la
direction dans laquelle vous déplacez les leviers soit correcte, les signaux risquent d’être enregistrés dans le mauvais
sens ! Utilisez toujours les télécommandes à microprocesseur sans mélangeur !
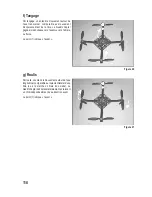
Déplacez le levier d’accélération (voir figure 12)
vers l’arrière en position zéro (moteur à l’arrêt), tous
les autres éléments de commande doivent être en
position neutre.
Si vous souhaitez faire voler le QuadroCopter en
« Pitch Reverse » (« moteur à l’arrêt », éloignez le
levier de commande du corps), déplacez le levier
d’accélération au maximum vers l’avant avant de
raccorder la batterie.
Figure 12
Summary of Contents for 450 ARF QC09
Page 166: ...166 ...
Page 167: ...167 ...































































